ボディーを組み立てよう
必要な道具
1 M5基板の搭載
必要な部品
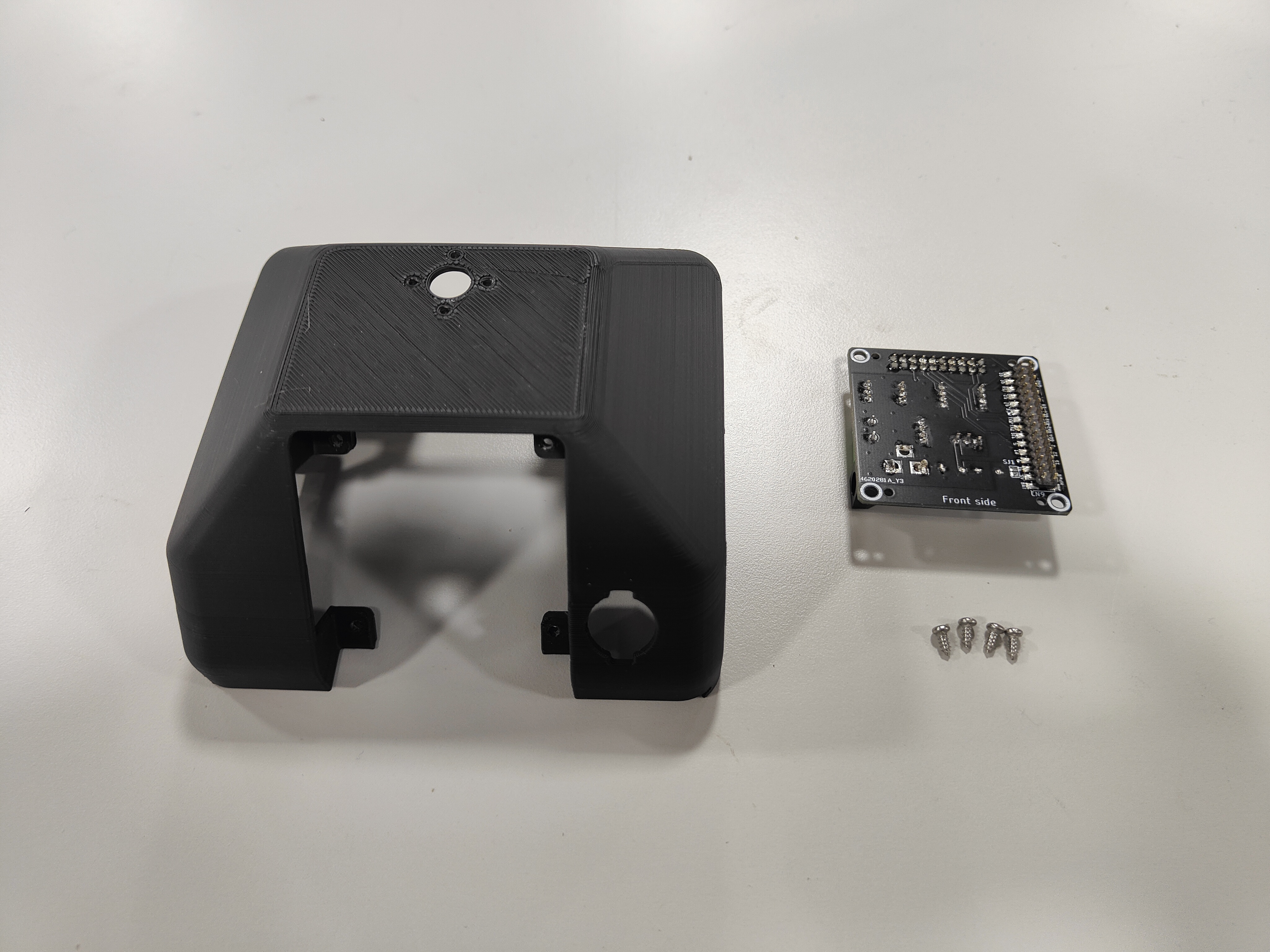
手順
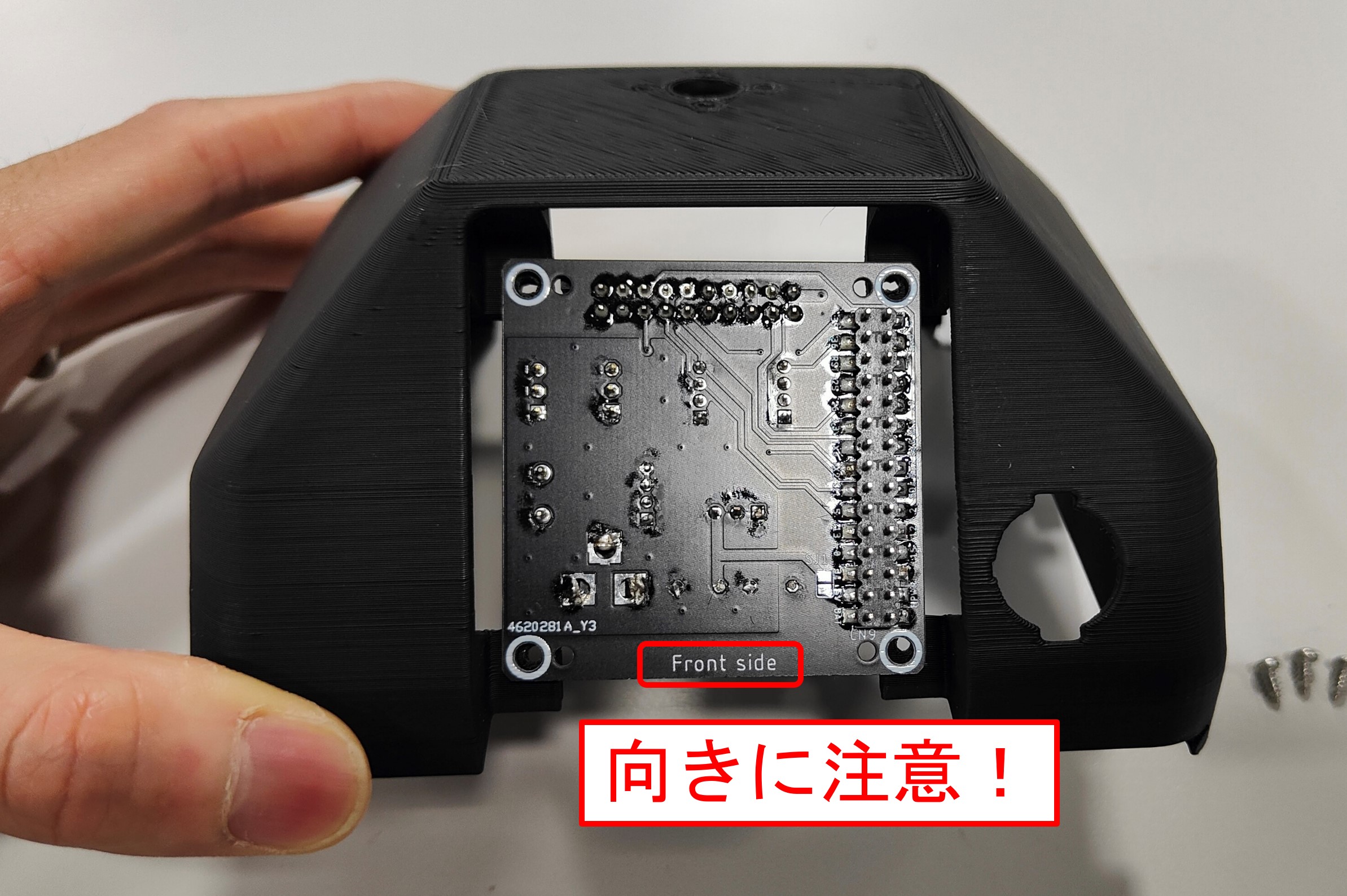
(1) M5基板 を表側から載せる。
CN9のピンヘッダが右前に来るようにすること
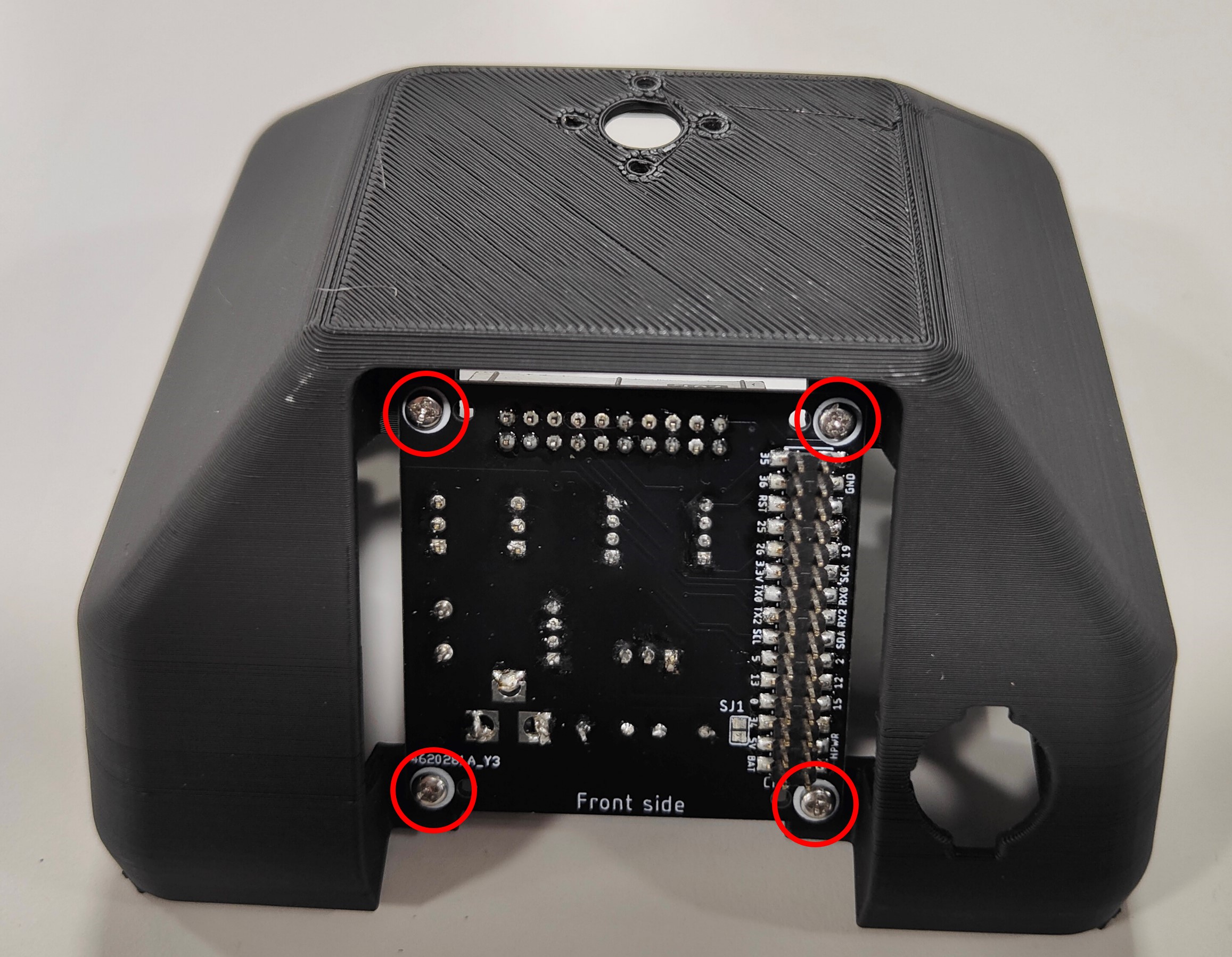
(37) タッピングビスM2.5-6 で4点を表面からねじ留めする。
2 温湿度気圧センサユニットの搭載
必要な部品
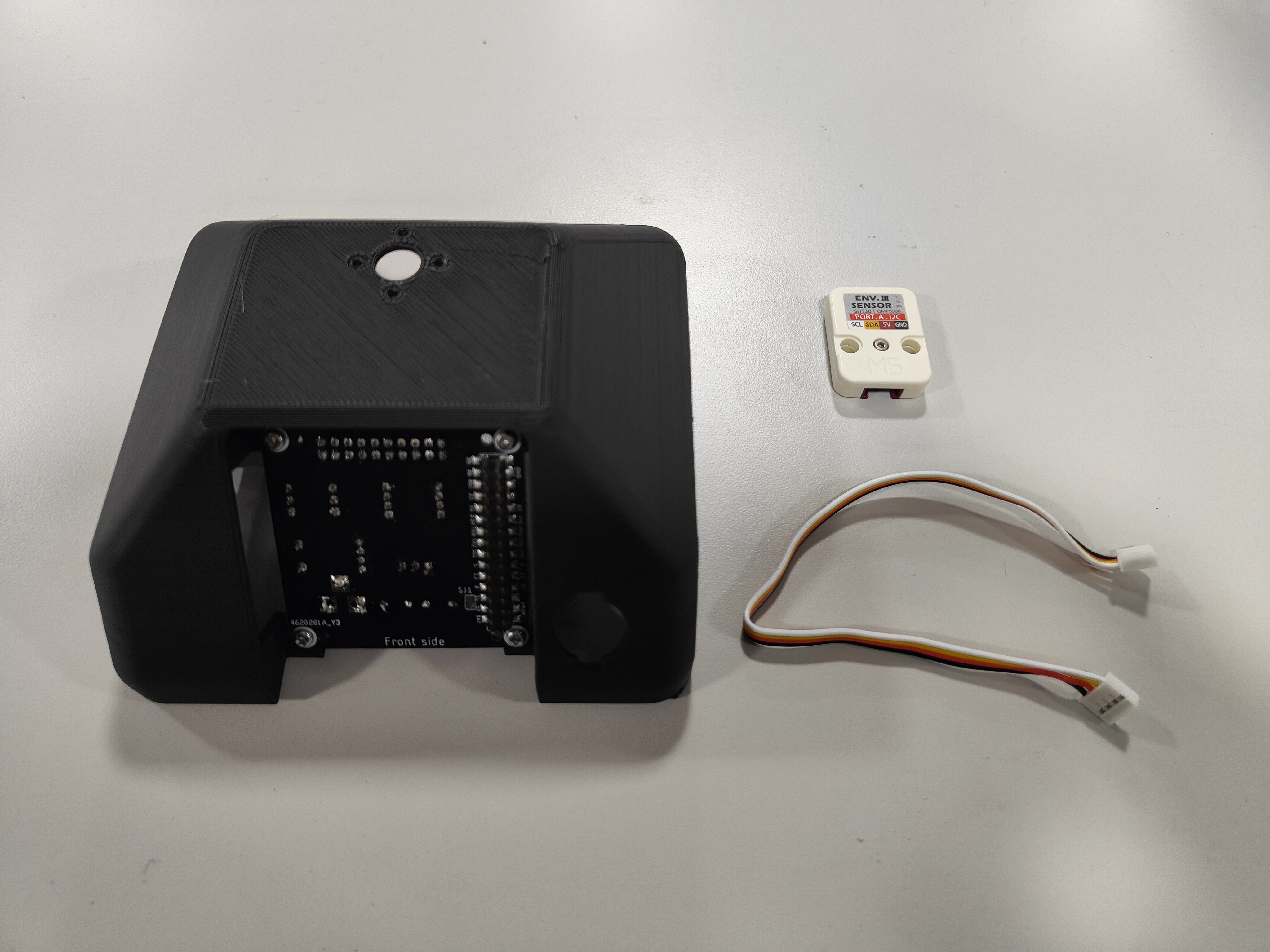
手順
(9) 温湿度気圧センサユニット ENVⅢ 付属の配線をボディーの右側面から通す。
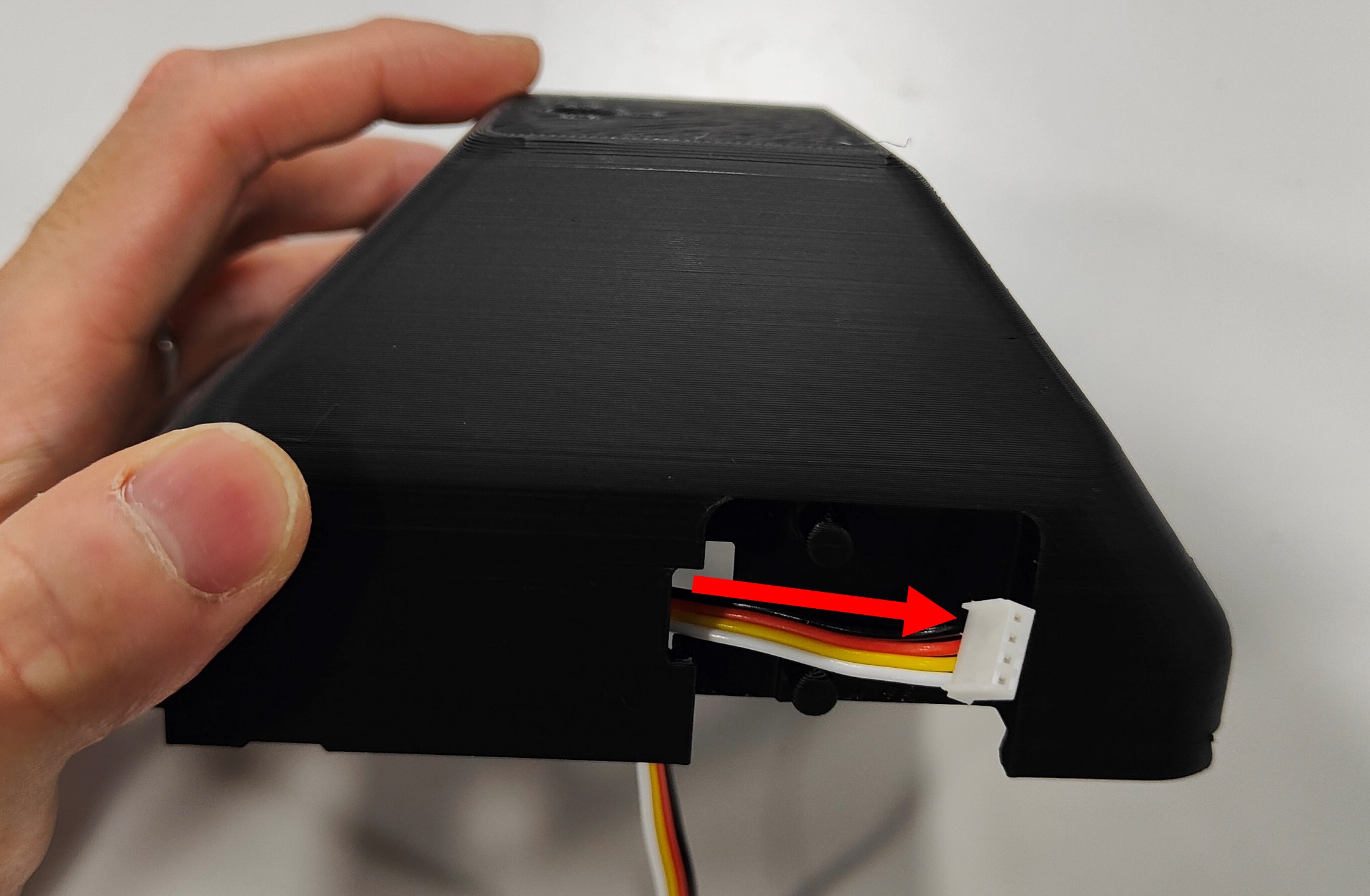
(9) 温湿度気圧センサユニット ENVⅢ を配線のコネクタに接続する。
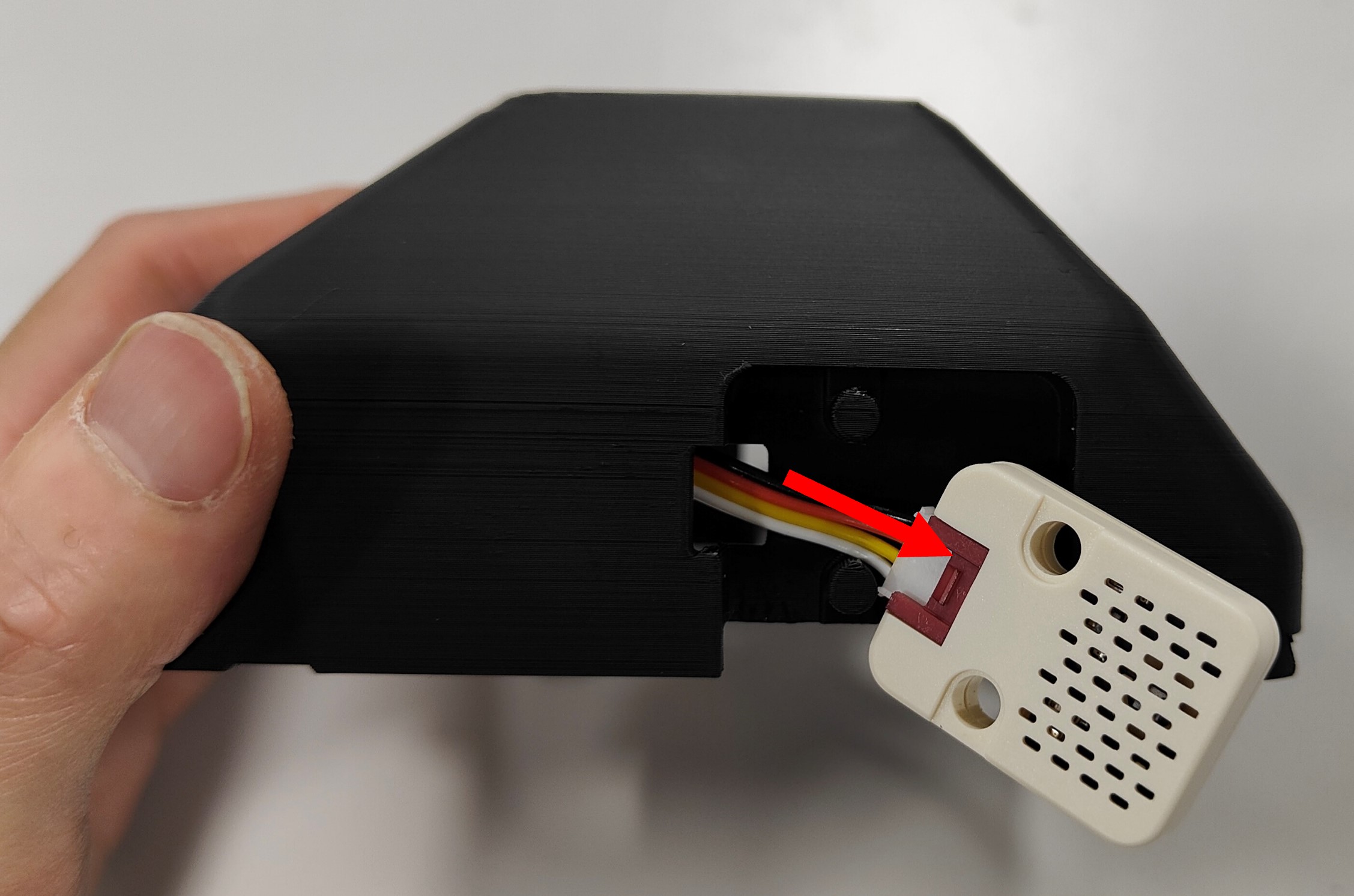
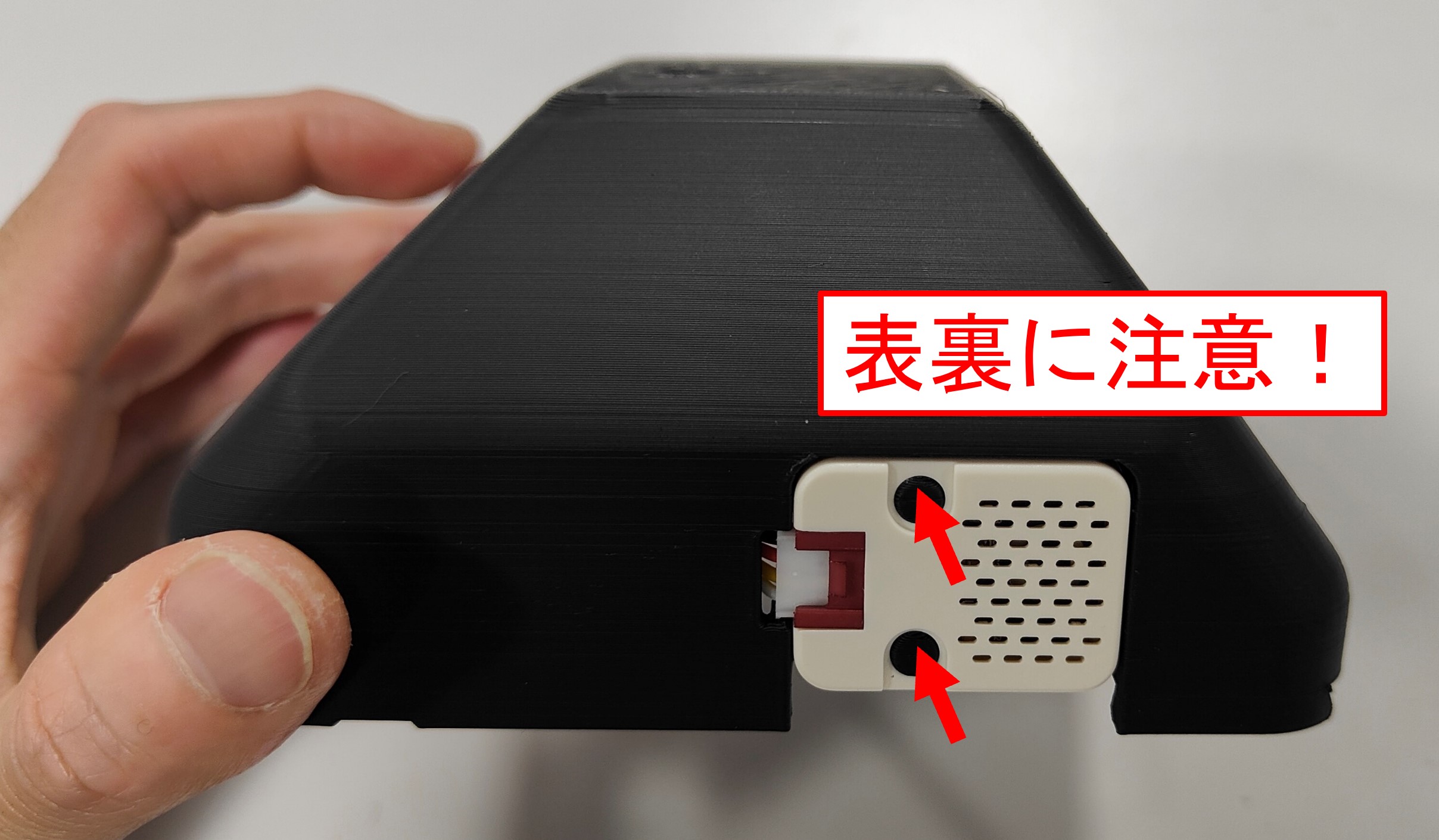
ENVⅢをボディーの突起に差し込む。
ENVⅢのラベルがボディーの内向きになるようにすること
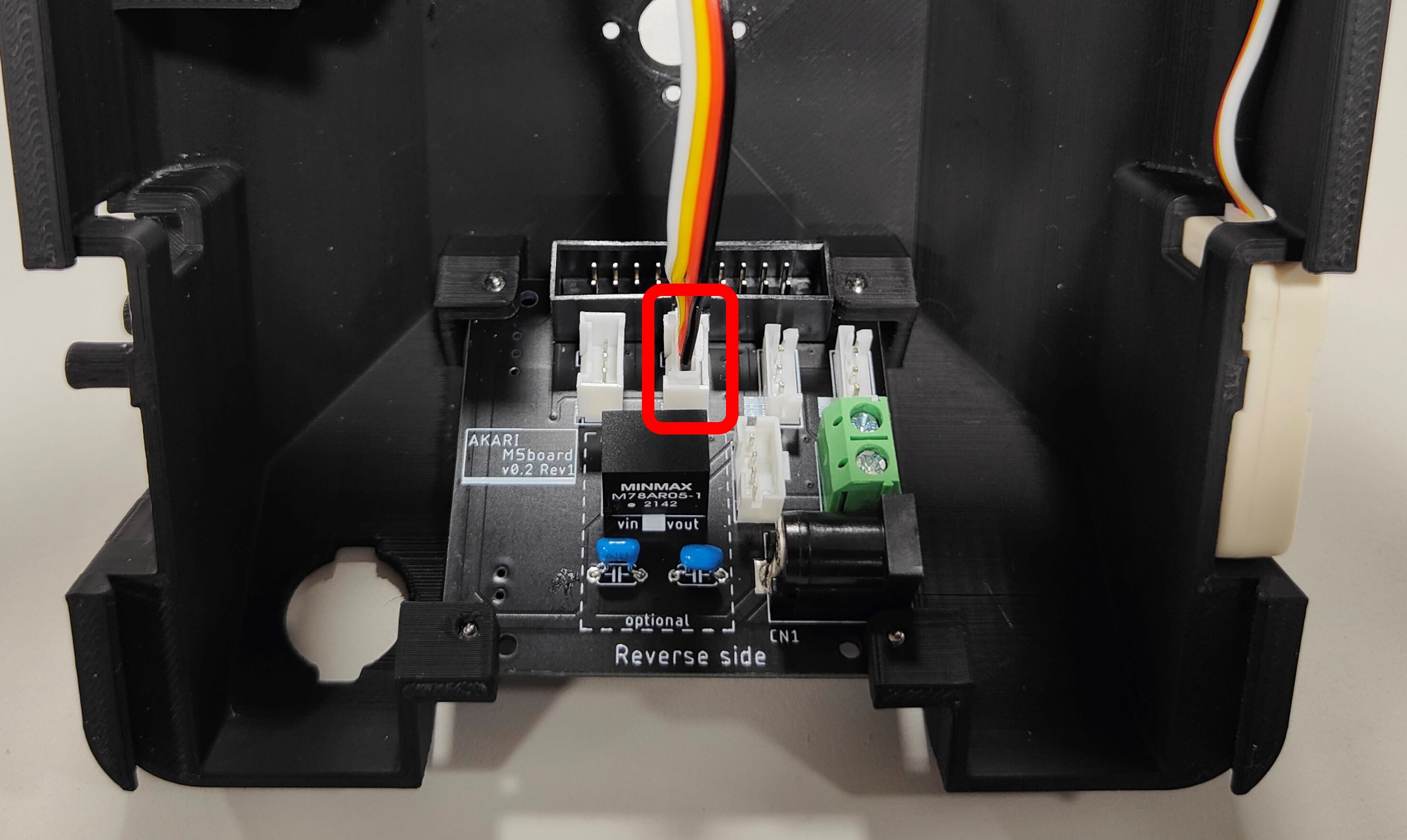
ケーブルの反対側(ボディー内部側)のコネクタをM5基板のCN6に差し込む。
3 光センサユニットの搭載
必要な部品
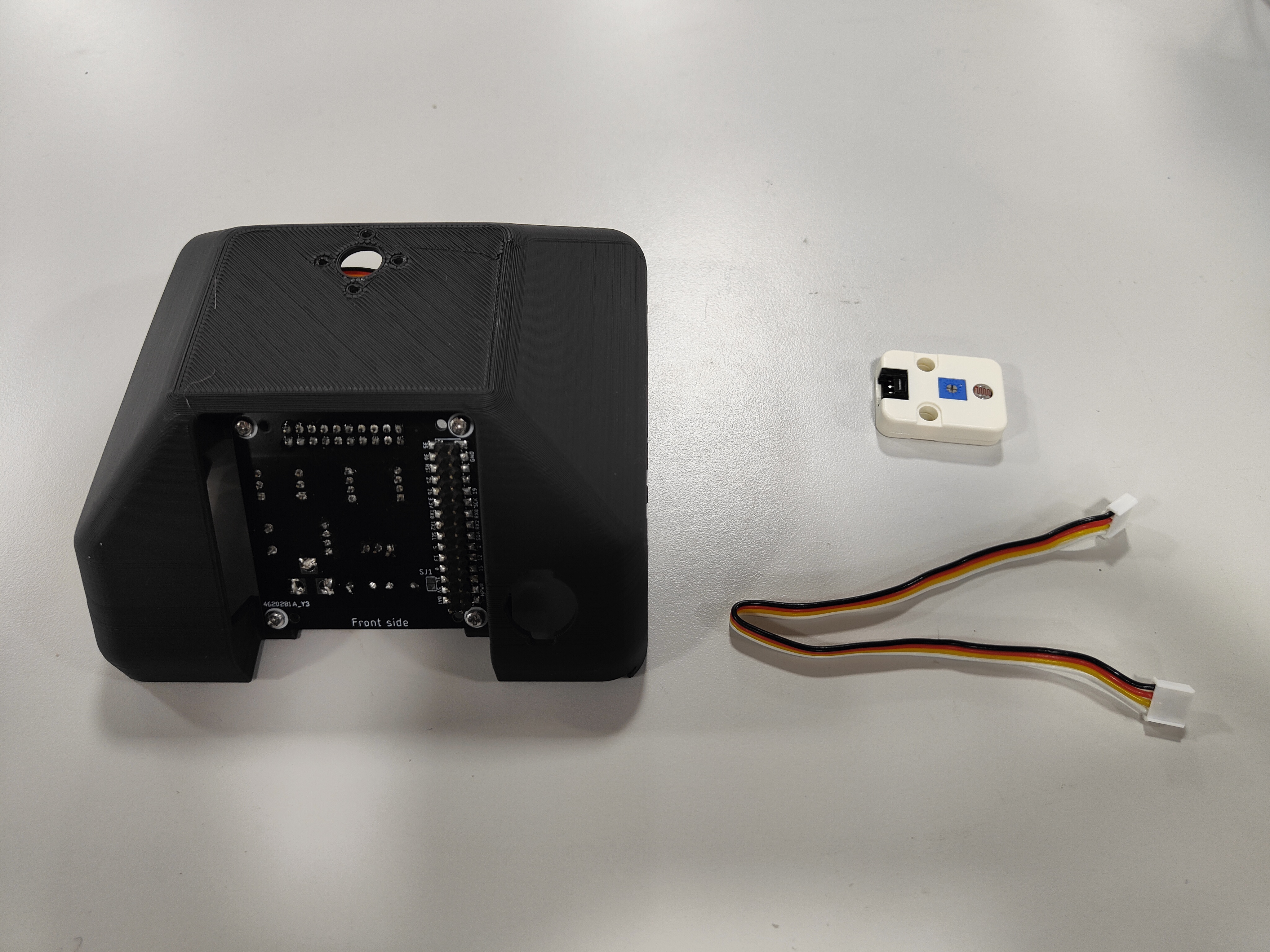
手順
(10) 光センサユニット 付属のケーブルをボディーの左側面から通す。
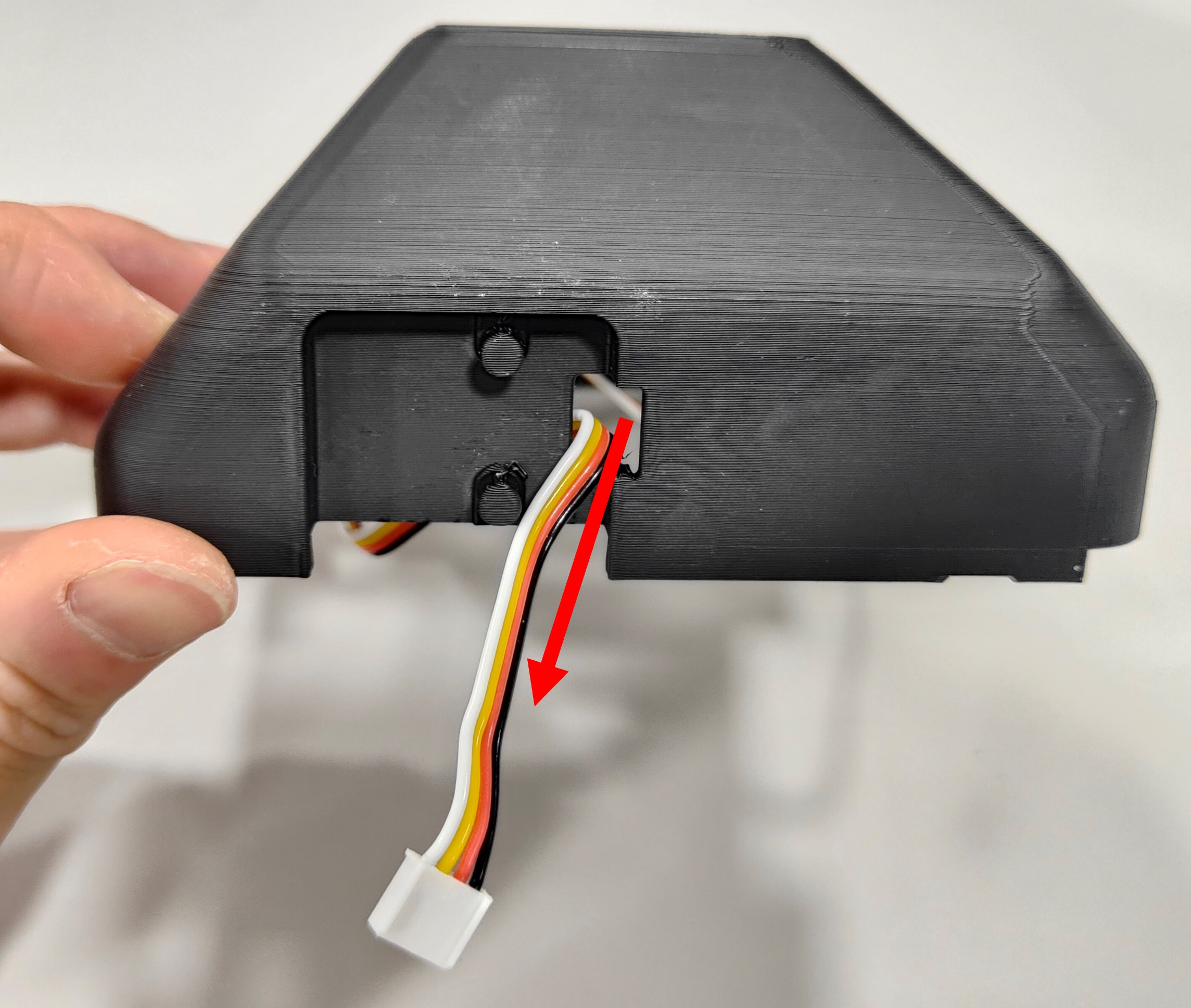
(10) 光センサユニット を配線のコネクタに接続する。
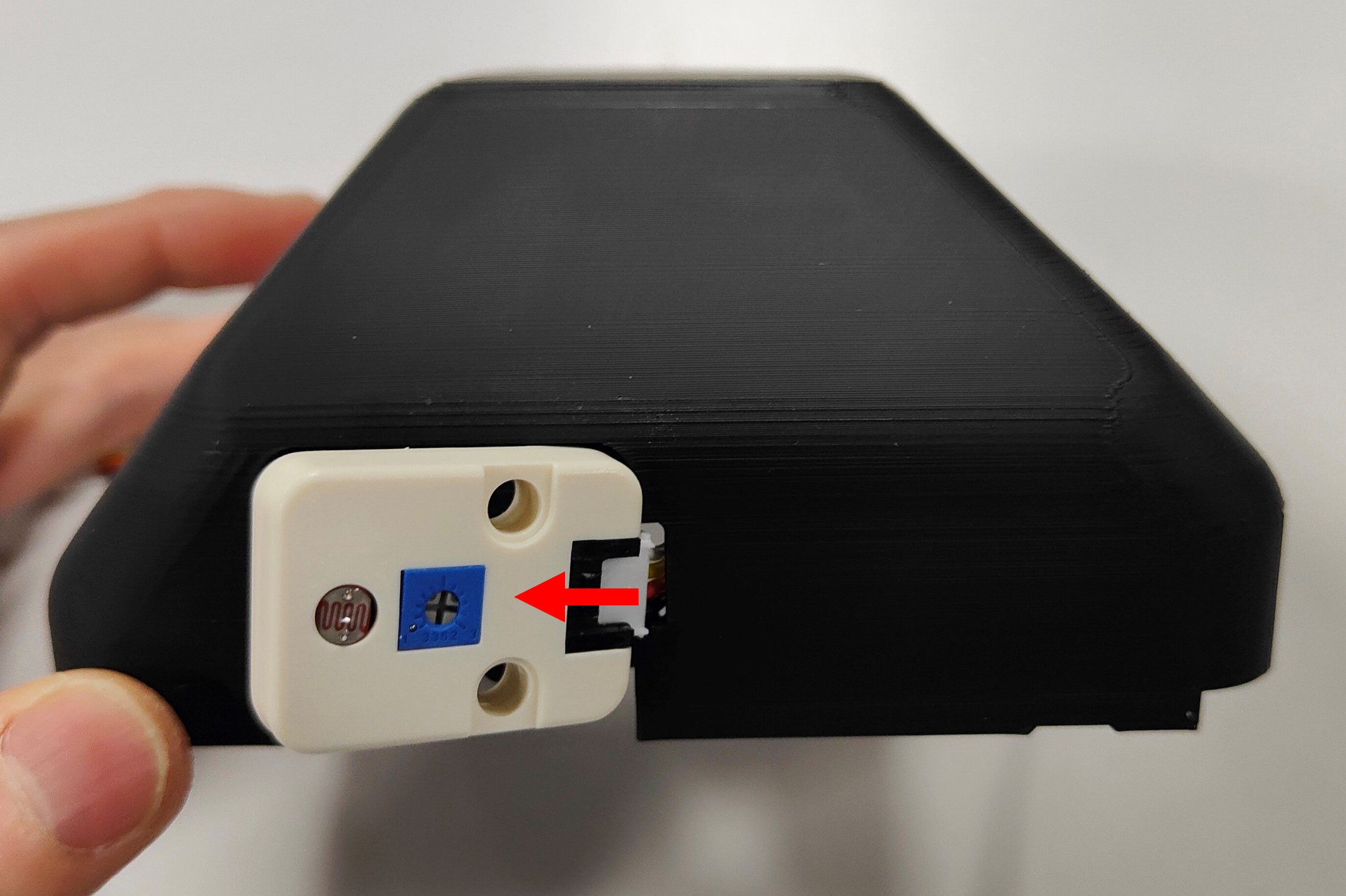
光センサをボディーの突起に差し込む。
光センサのラベルがボディーの内向きになるようにすること

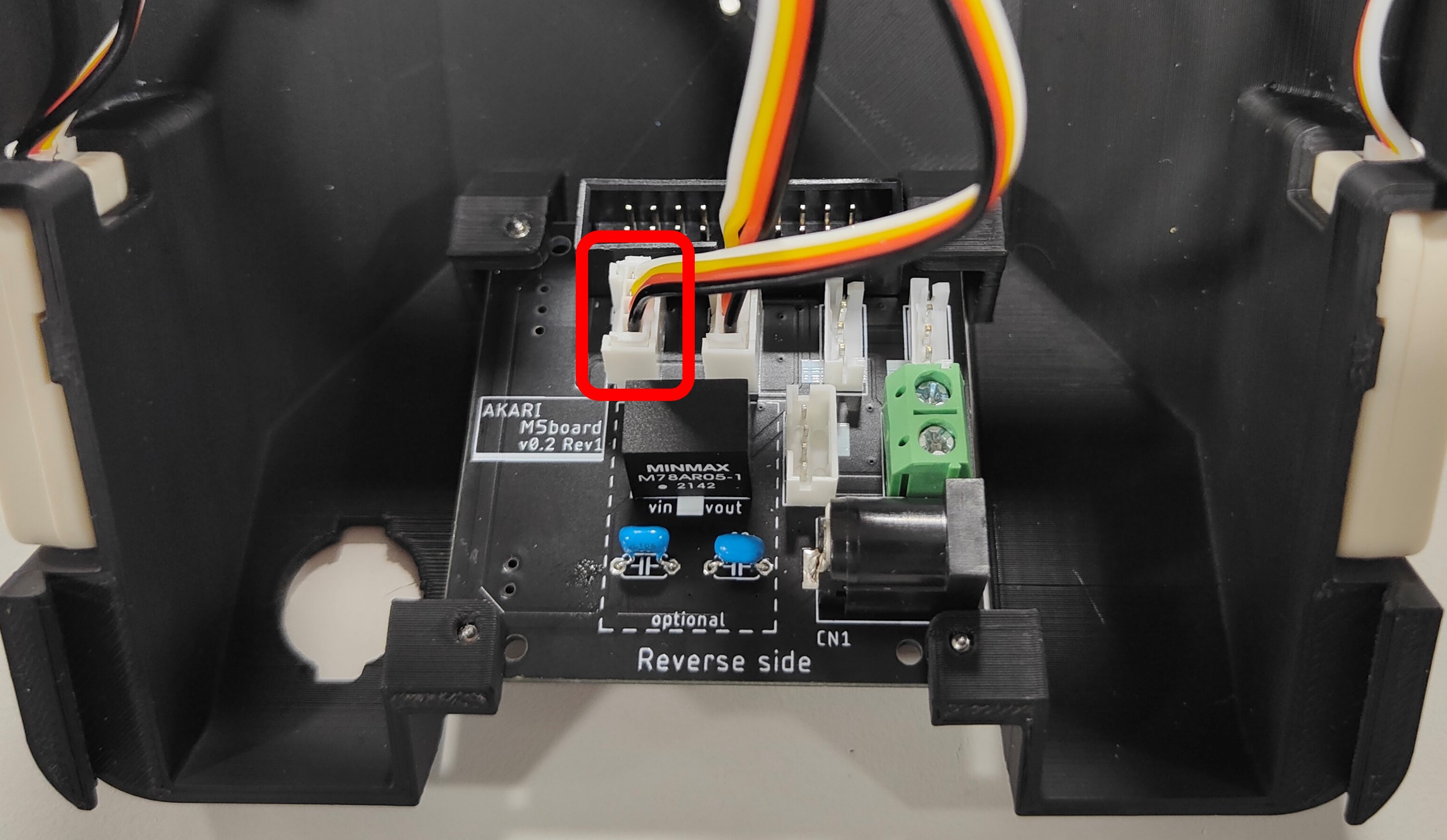
ケーブルの反対側(ボディー内部側)のコネクタをM5基板のCN7に差し込む。
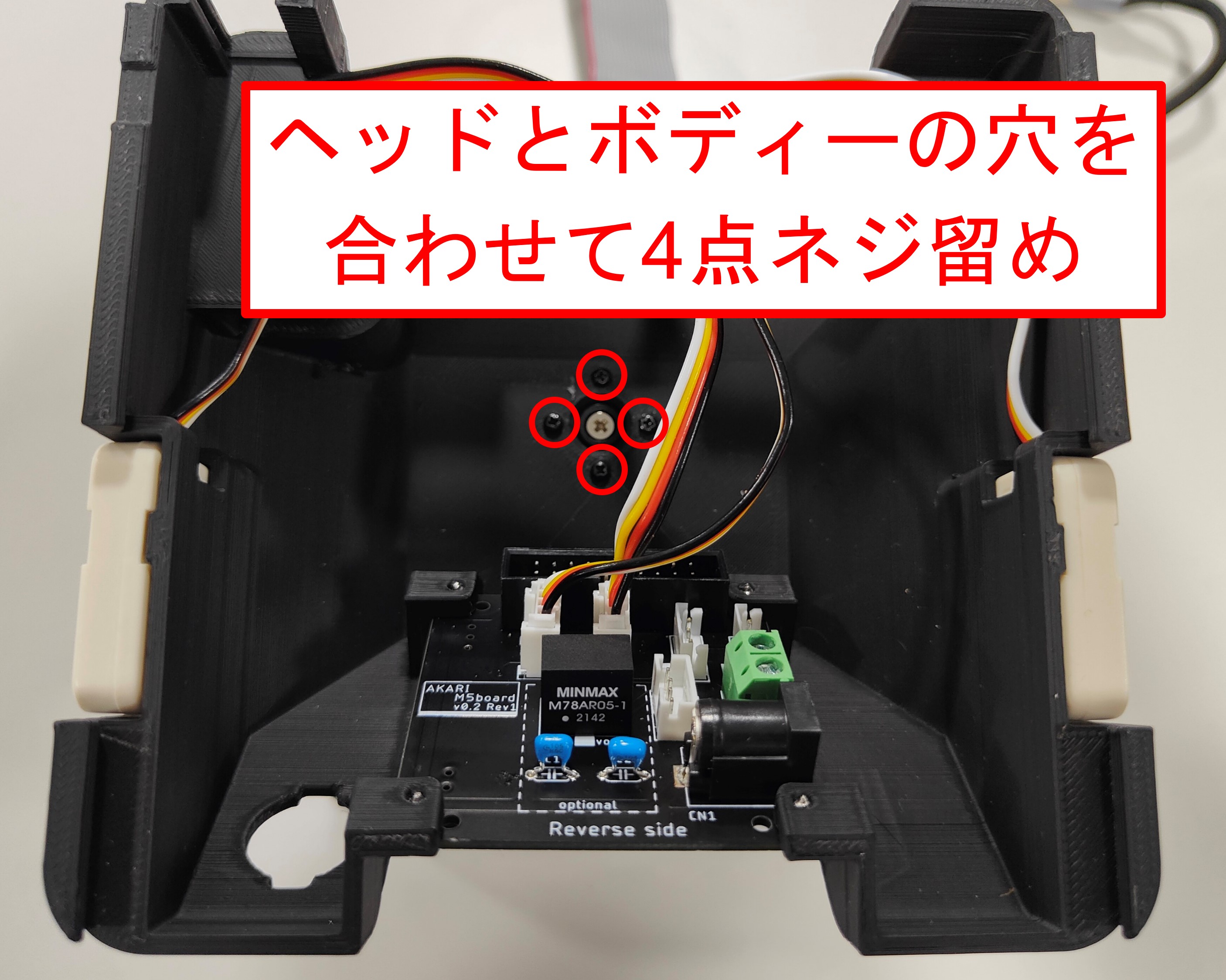
4 ヘッドとボディーの結合
必要な部品

手順
ヘッドとボディーを図のように合わせ、内部から (23)Dynamixelモータ付属のネジ(黒) で4点ねじ留めする。

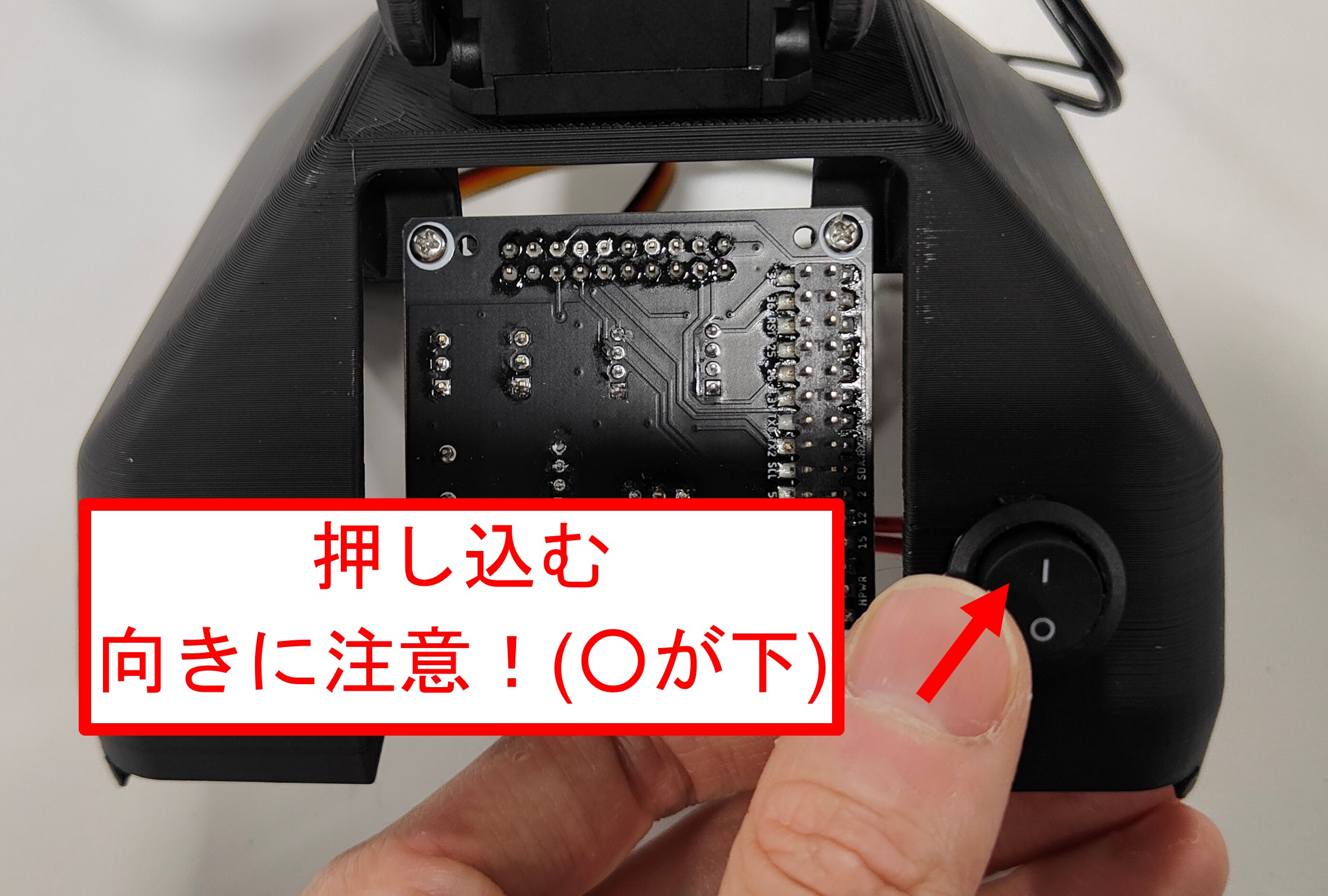
5 電源スイッチの搭載
必要な部品

手順
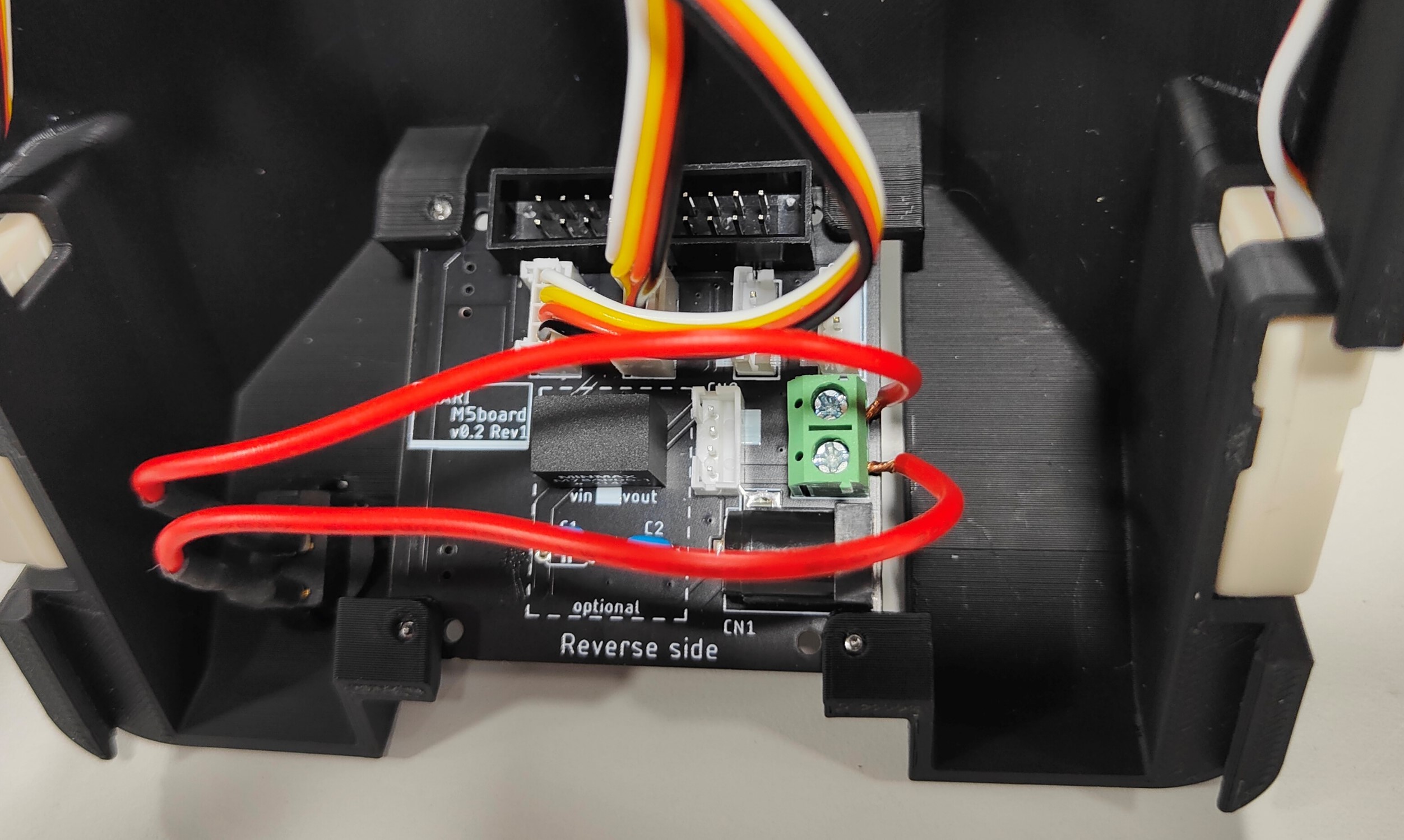
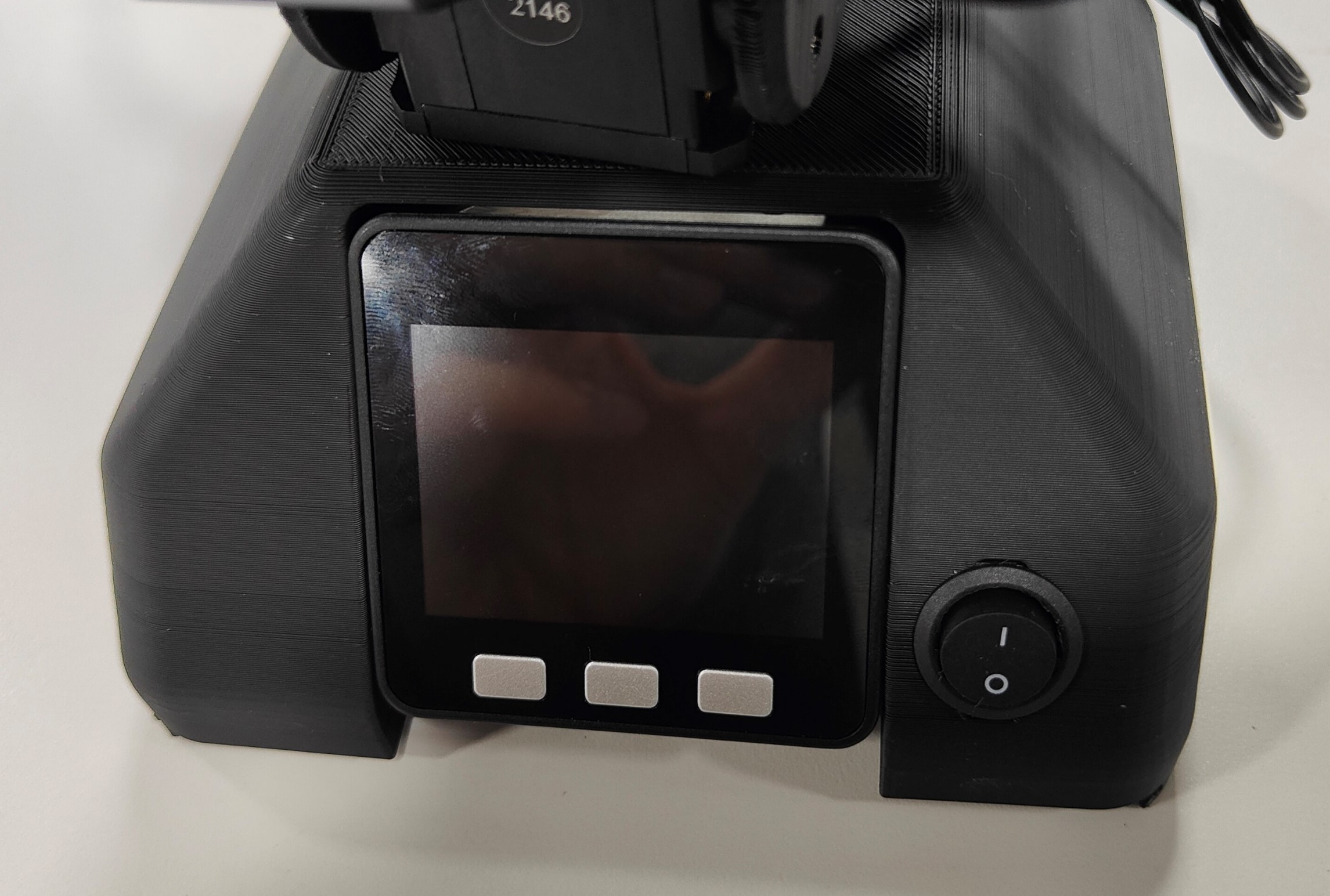
ボディー表面のスイッチ用の穴に表から2. の配線を通していき、 (33) ロッカスイッチ汎用ON-OFF 2極 を押してはめ込む。
○マークが下になるように
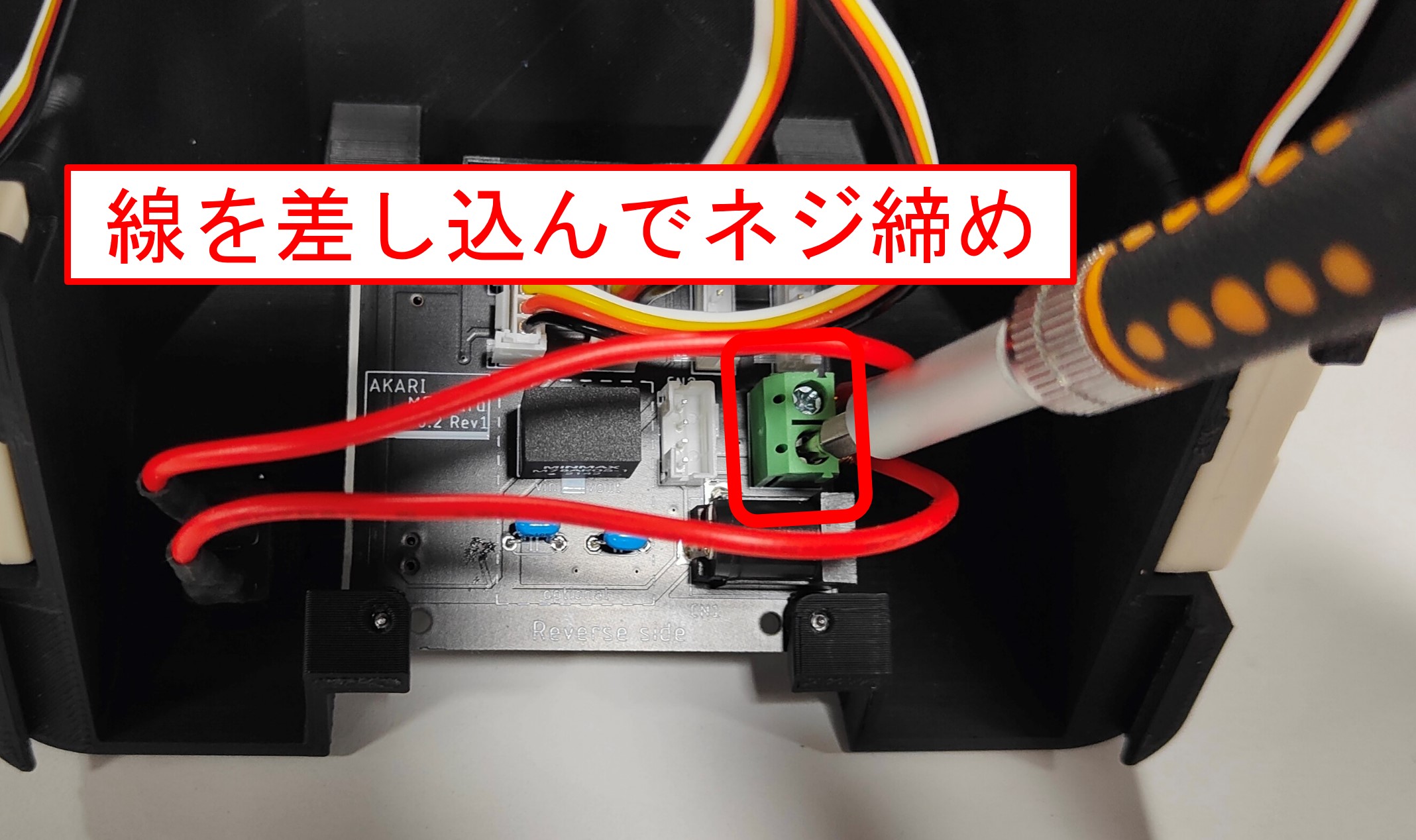
ケーブルの反対側をM5基板のCN3のターミナルブロックに差し込み、ネジを締めて固定する。
6 DCジャックの搭載
必要な部品

手順
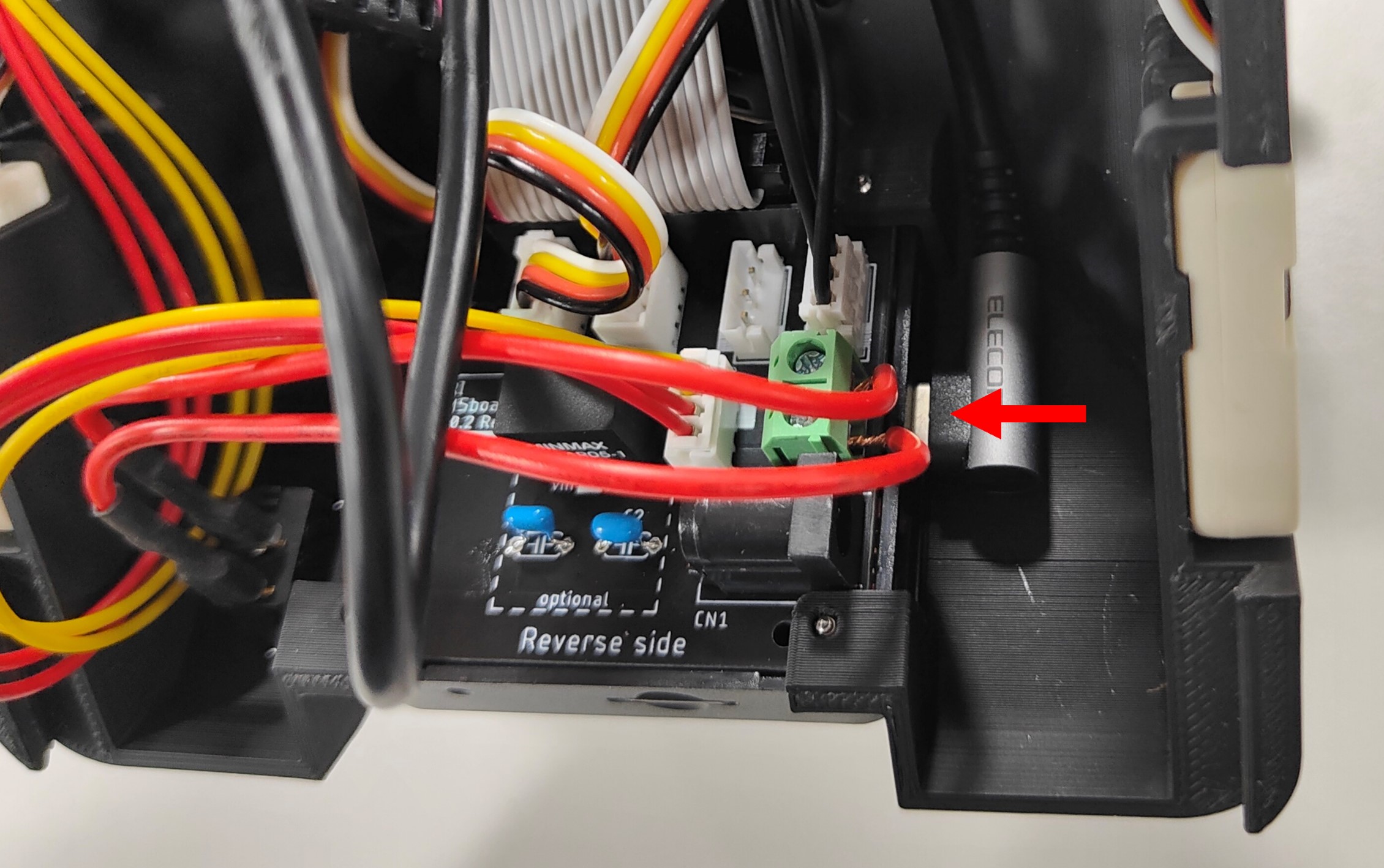
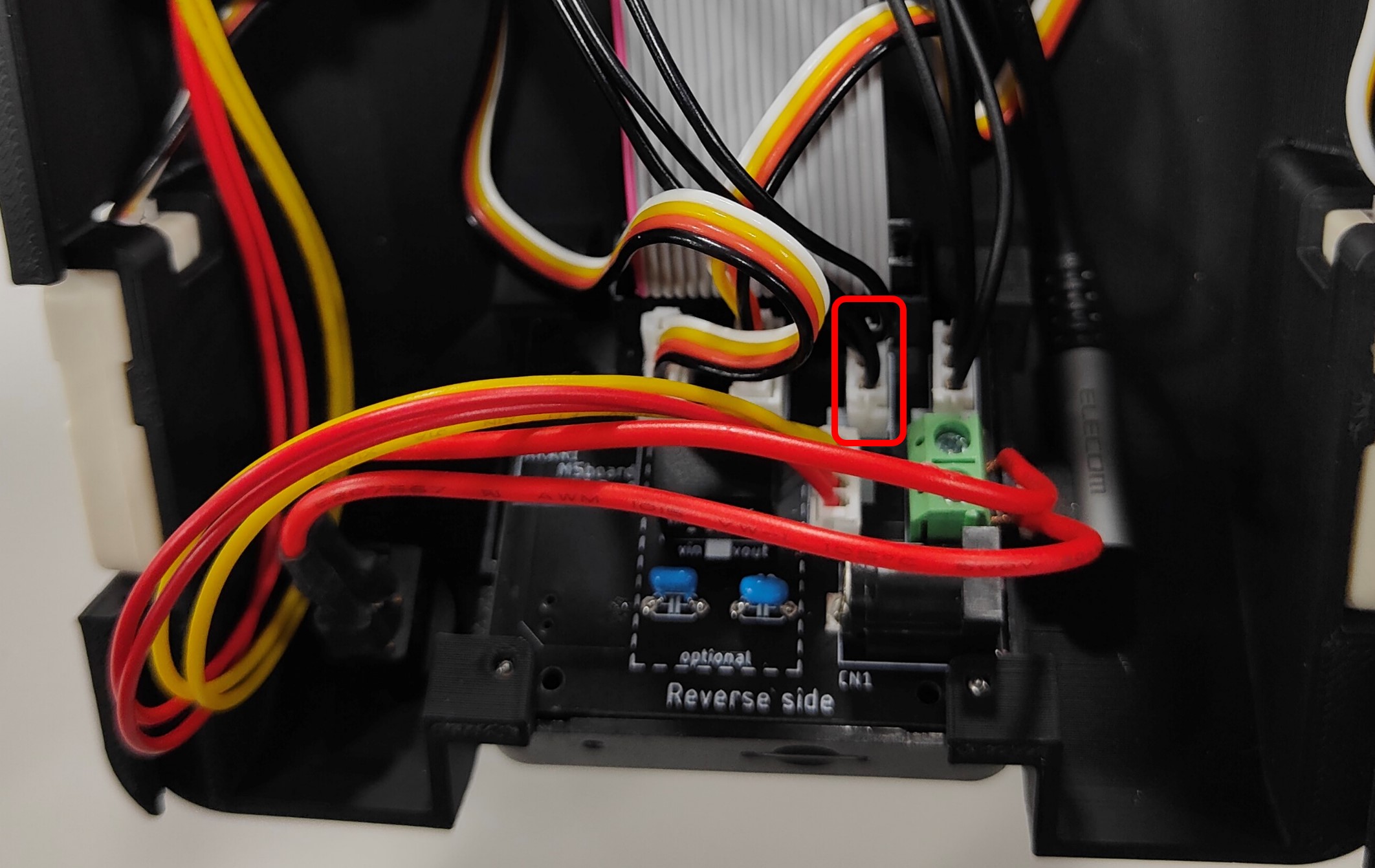
(34) 電源ジャック 2.1mm JST PHコネクタ4ピンメス をボディーの溝に沿って差し込む。
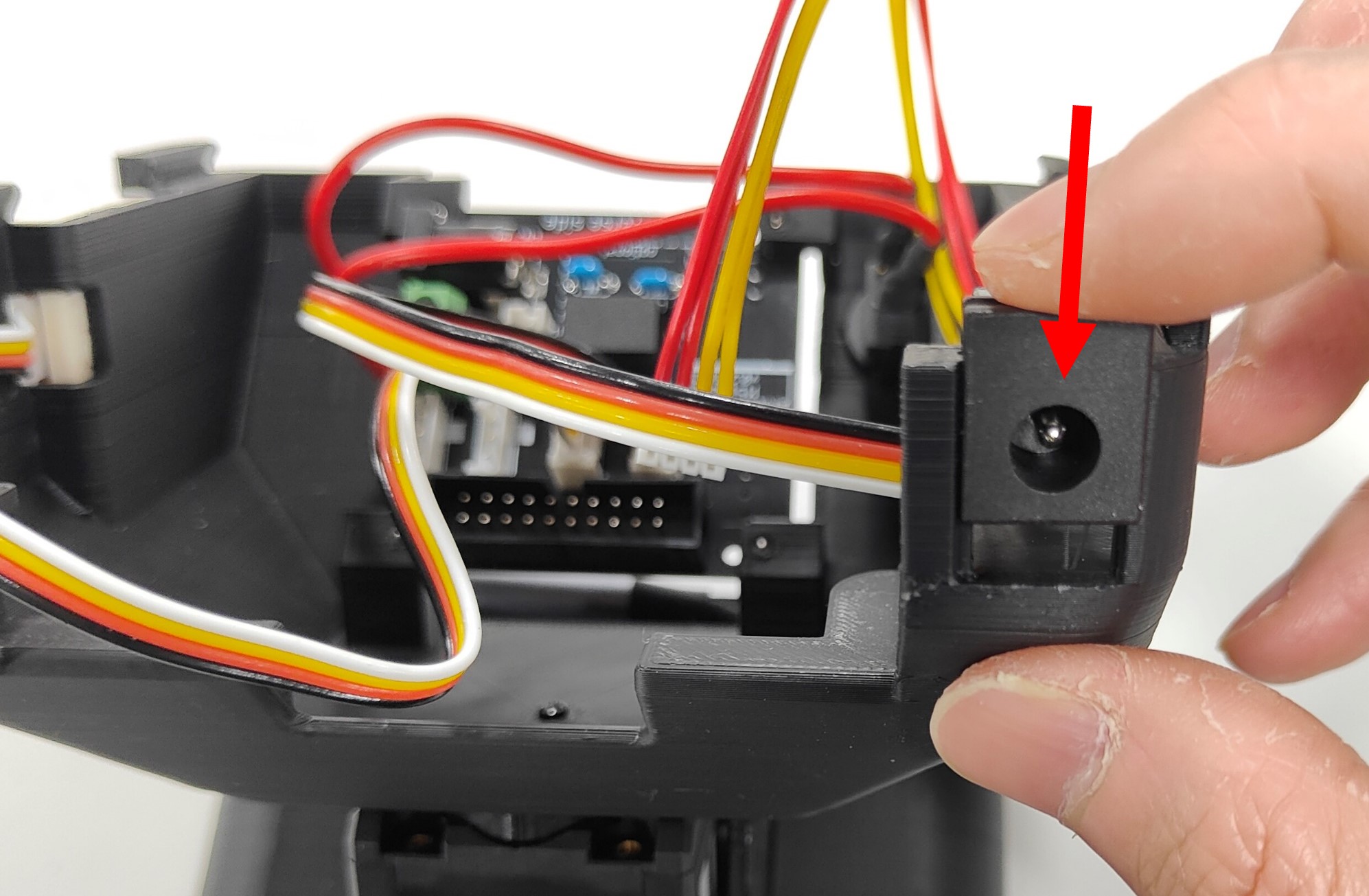
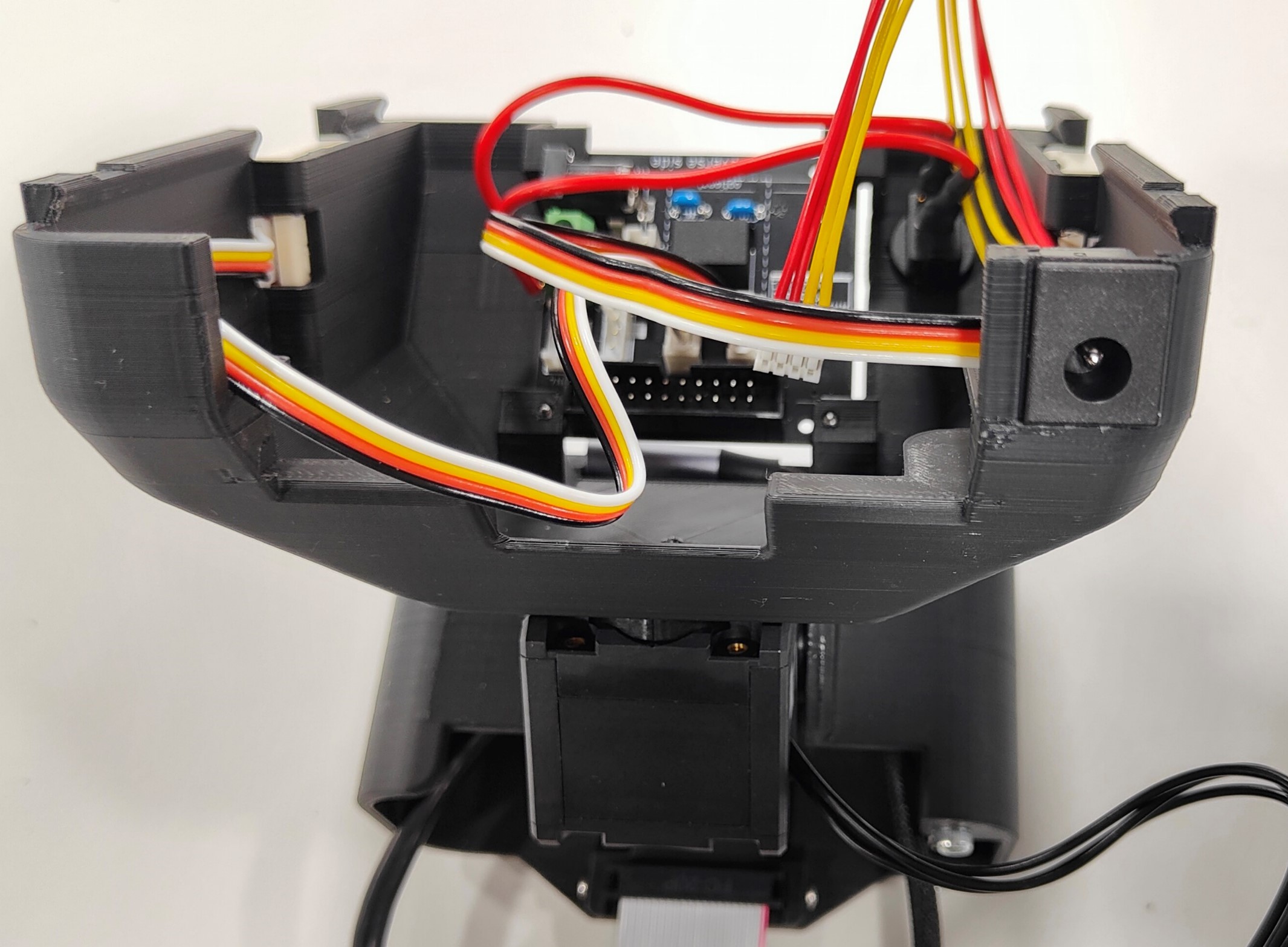
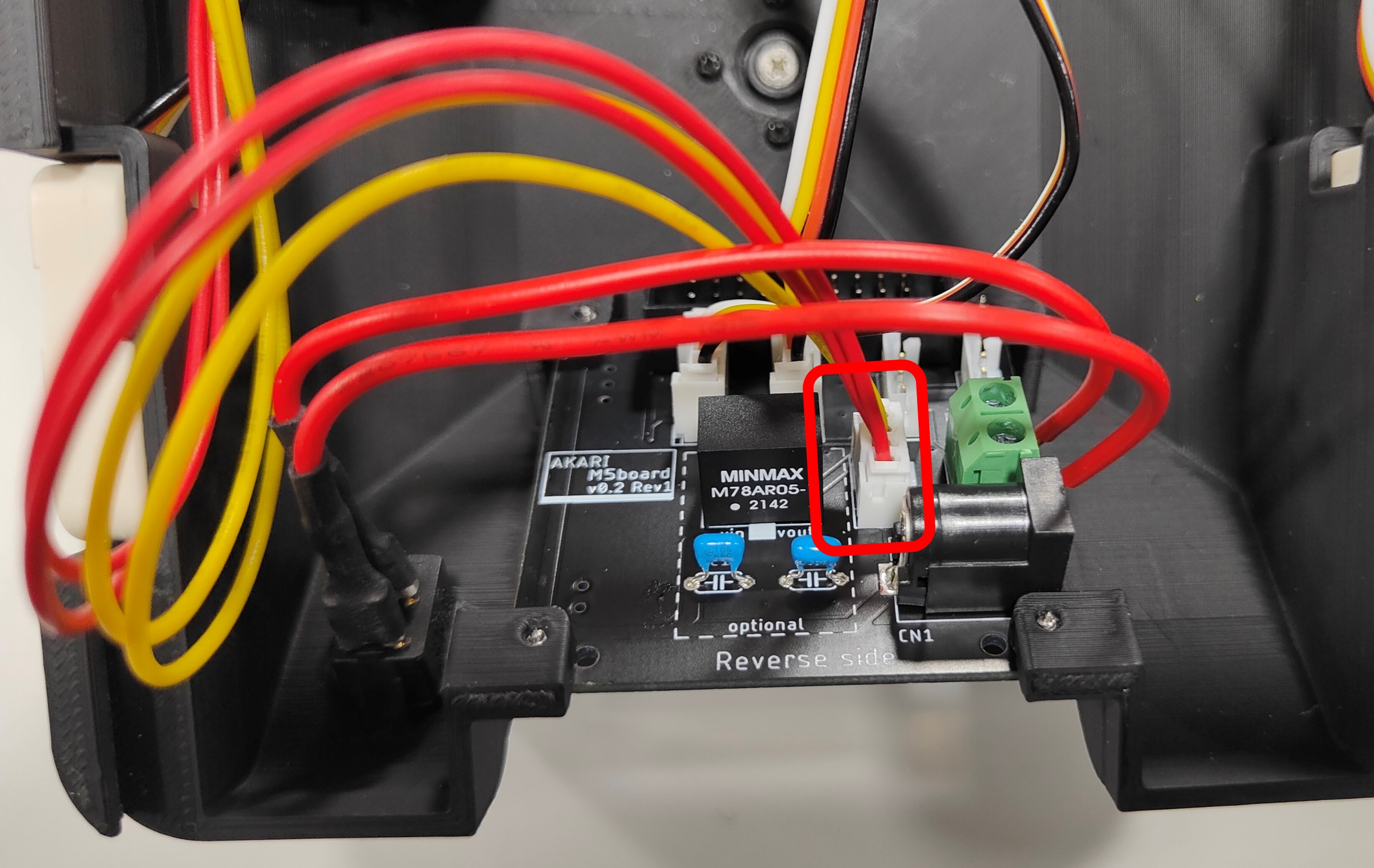
ケーブルの反対側(ボディー内部側)のコネクタをM5基板のCN2に差し込む。
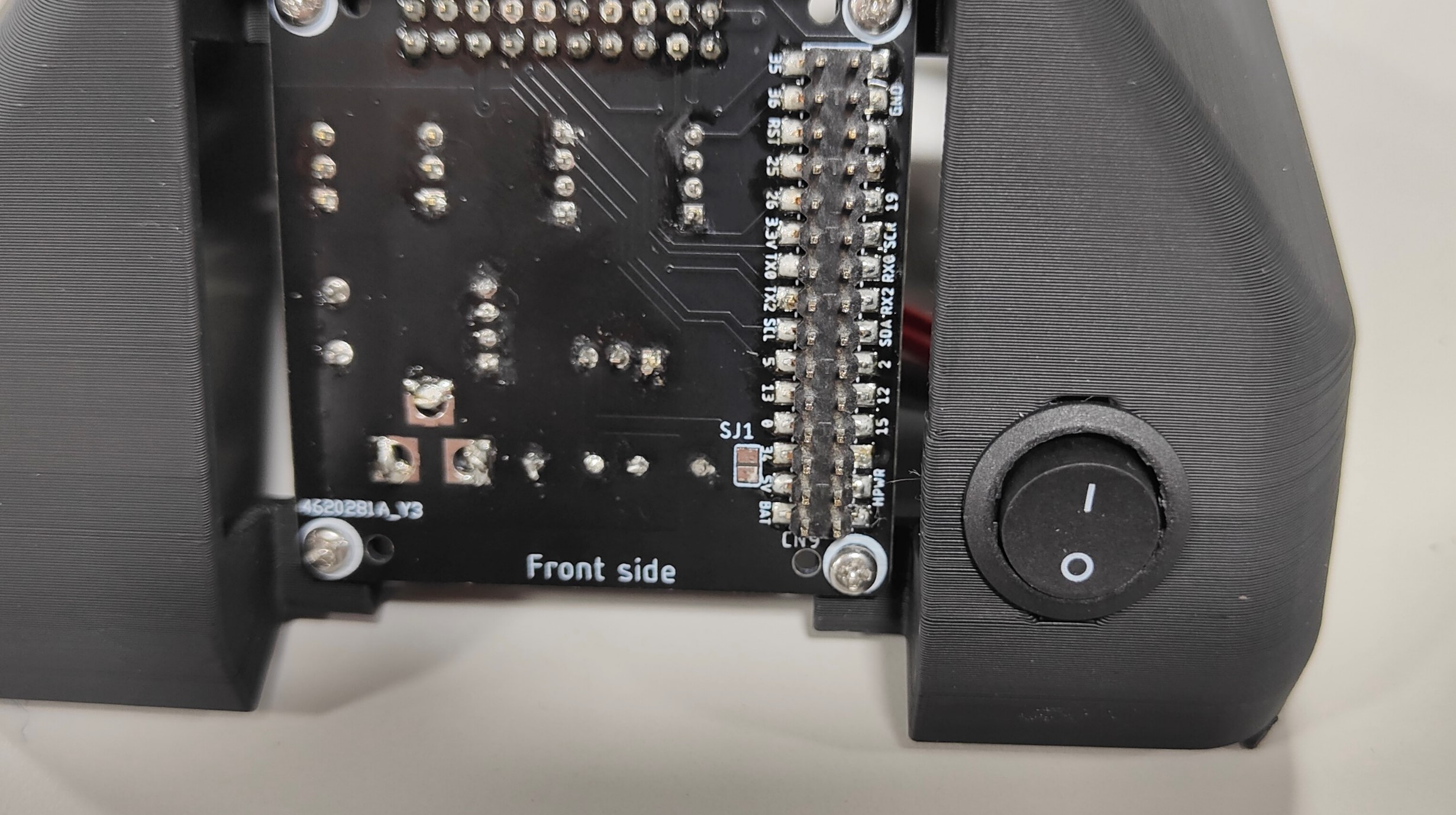
7 M5Stackの搭載
必要な部品

手順
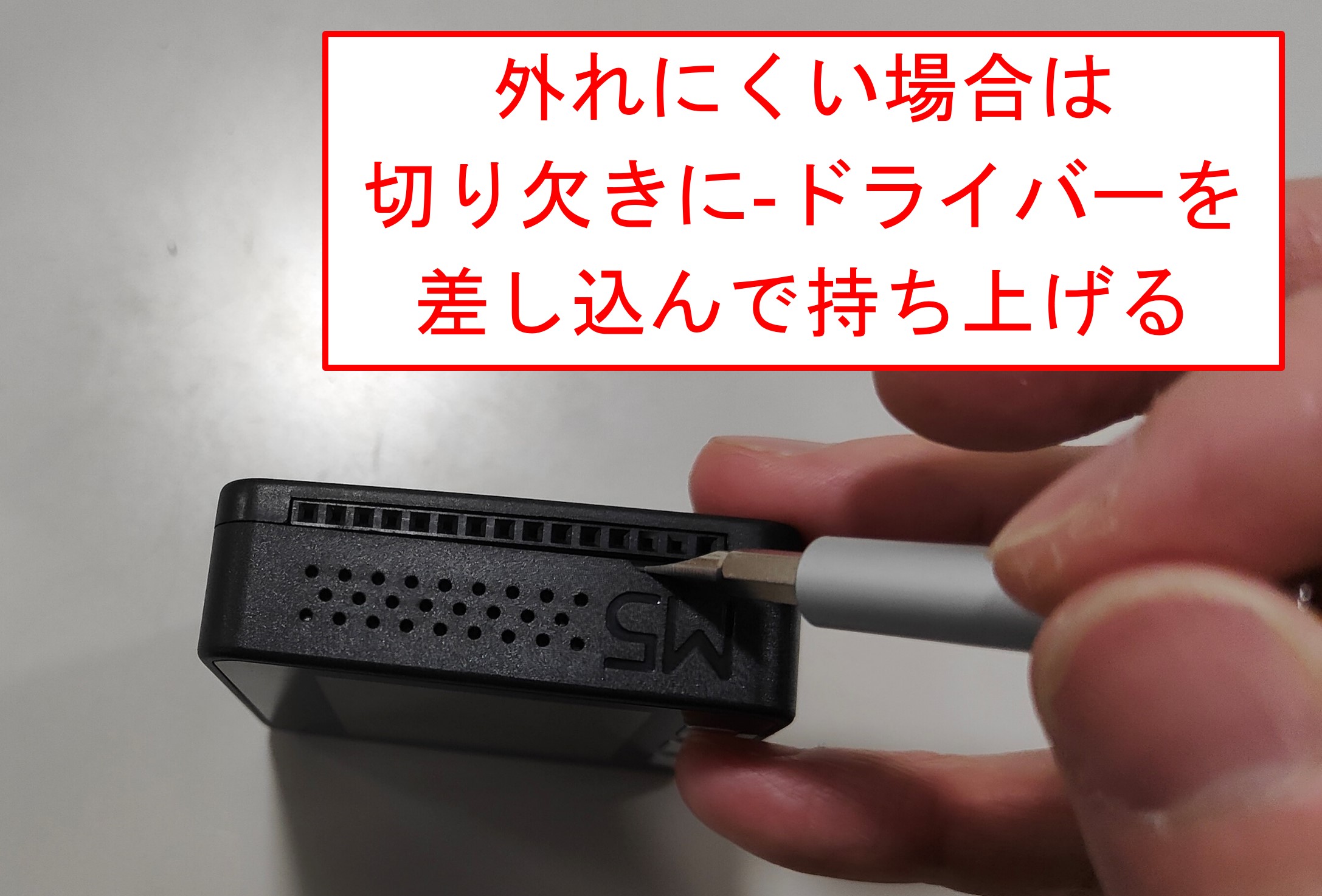
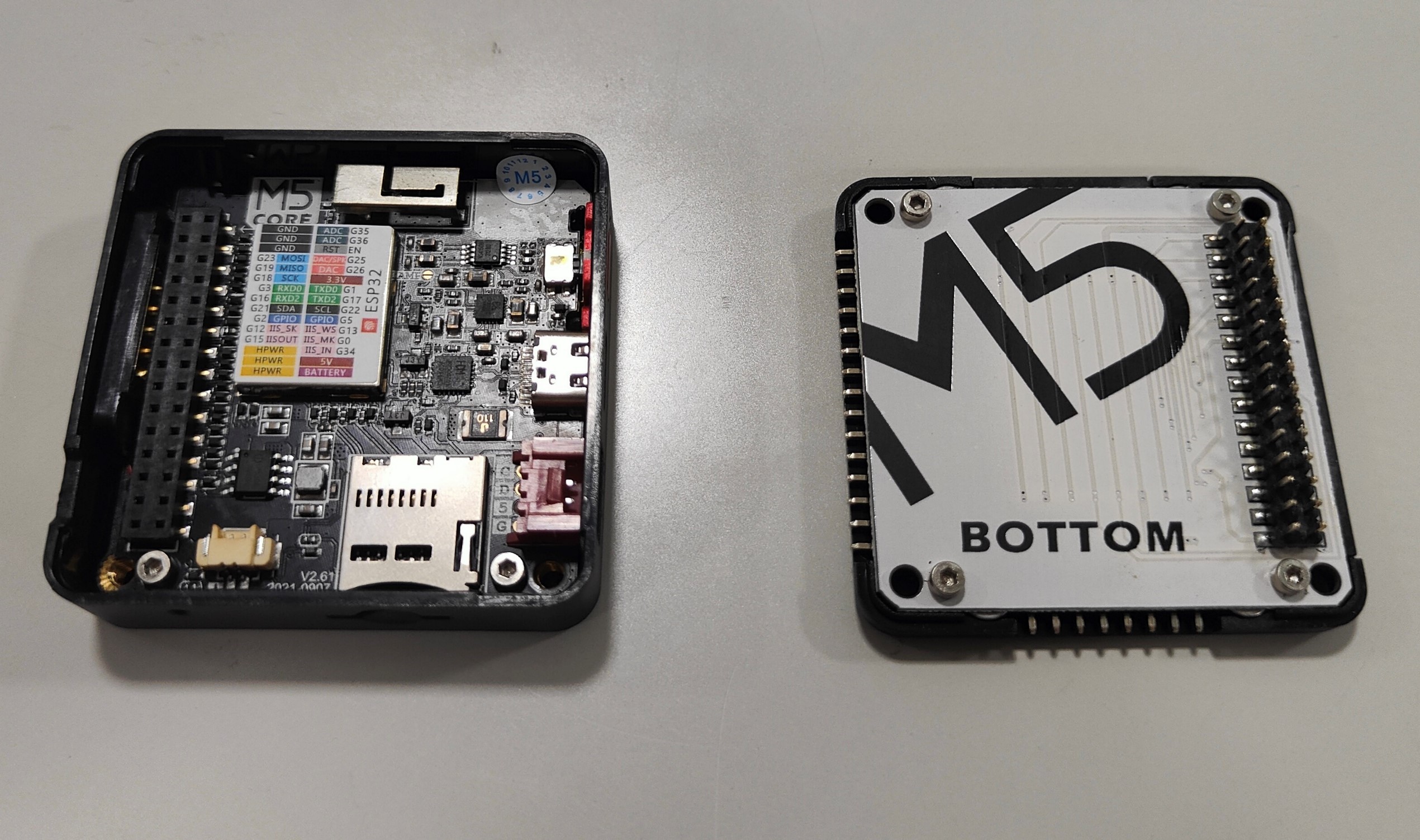
1. (8) M5Stack BASIC の背面を外す。 | 外れにくい場合は、マイナスドライバーをM5Stack側面の溝に差し込んで開く。
(8) M5Stack BASIC の前面を、ボディーに取り付けたM5stack用基板に表から差し込む

8 GPIOケーブルの接続
必要な部品
手順
ヘッドのリボンケーブルをボディー背面から内部に通す。
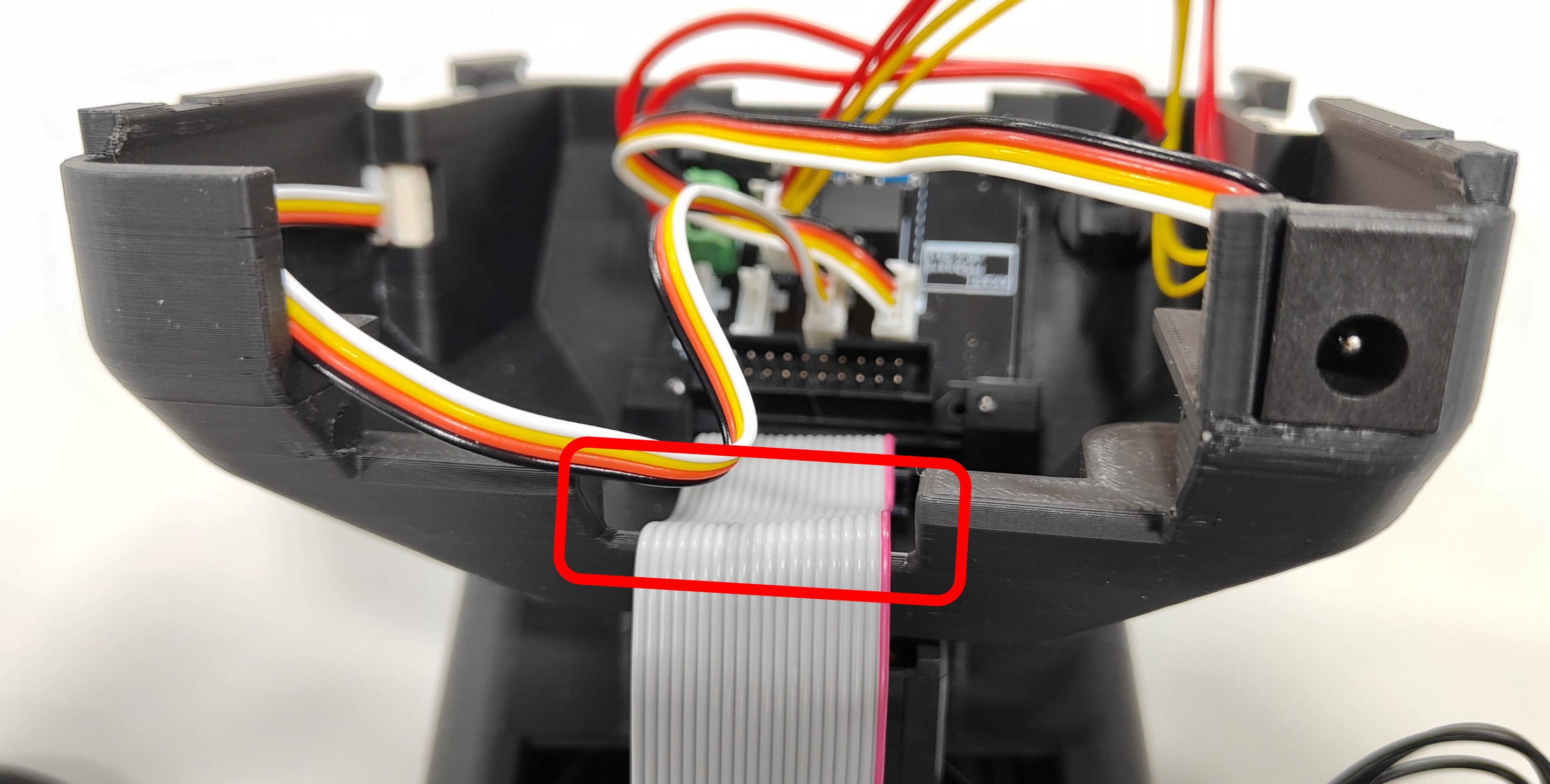
M5stack基板のCN8に差し込む。
9 USB2DXIFの接続
必要な部品

手順
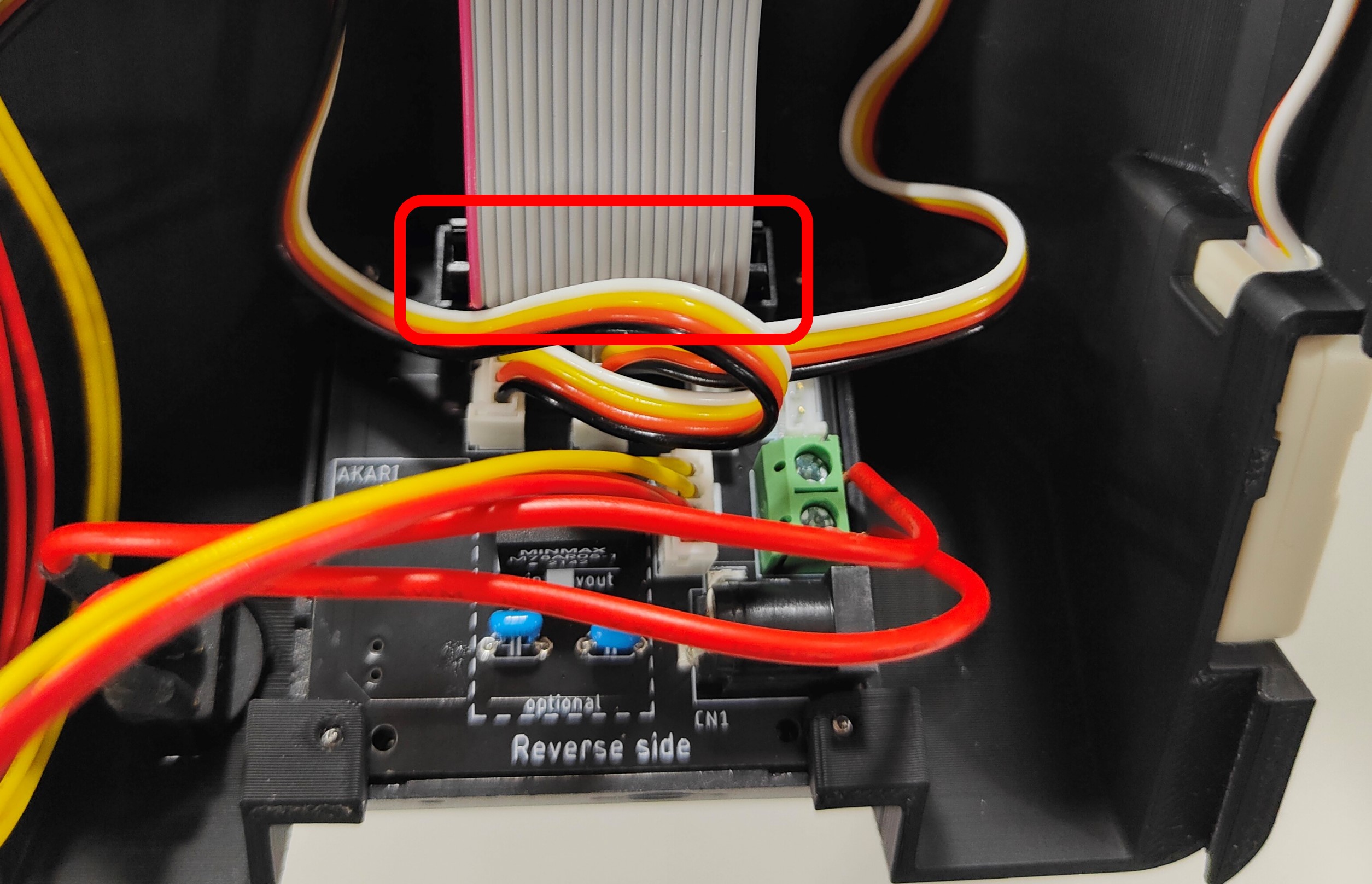
(25) USB2DXIF に (26) Robot Cable-X3P を差し込む。

(25) USB2DXIF に (27) USB-CオスtoUSB-Aオス 変換アダプタ を差し込む。

2.の反対側のコネクタをCN4に差し込む。
基板側コネクタに(13-B) 2mmピッチピンヘッダ 1✕3を採用した場合は、図を見て同じ向きに接続すること!
10 M5StackのUSB接続
必要な部品

手順
(30) USB Type-Cケーブル 0.3mL字 をボディー部の内側からM5Stack本体側面に差し込む。
11 モータ線の接続
必要な部品
手順
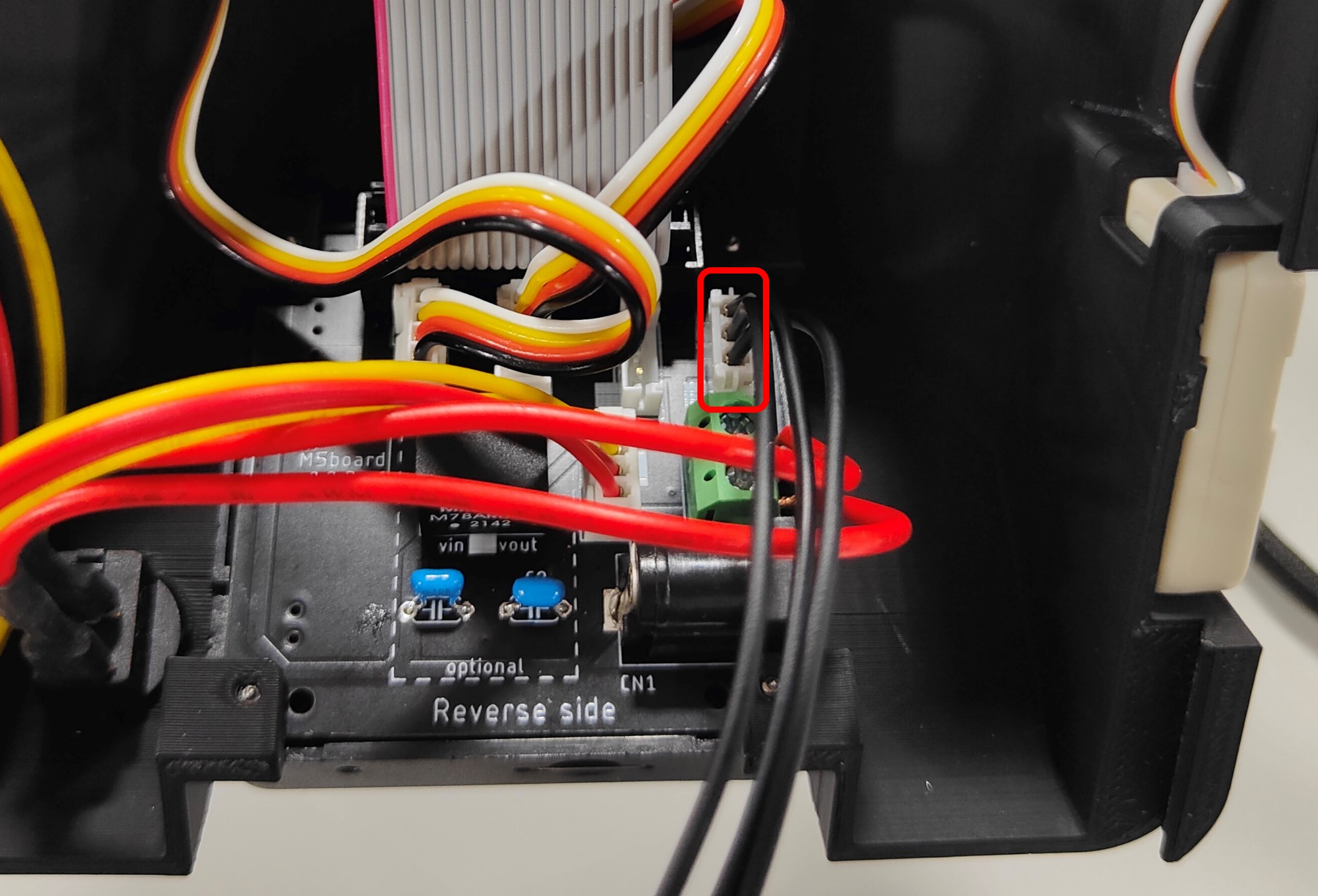
ヘッドのDynamixelから出ているケーブルをボディー背面から内部に通す。
M5stack基板のCN5に差し込む。
基板側コネクタに(13-B) 2mmピッチピンヘッダ 1✕3を採用した場合は、図を見て同じ向きに接続すること!
12 カバーの取り付け
必要な部品

手順
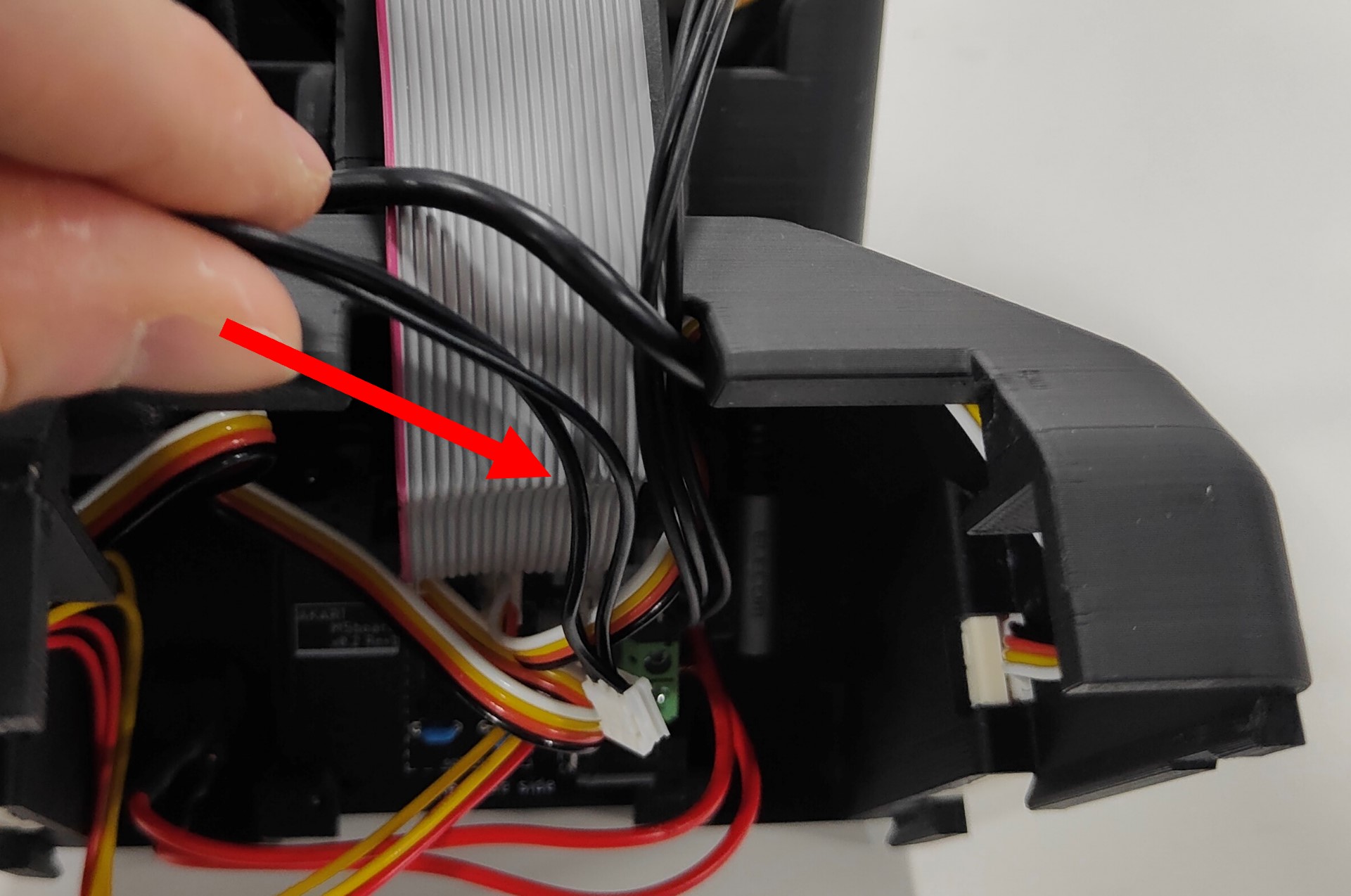
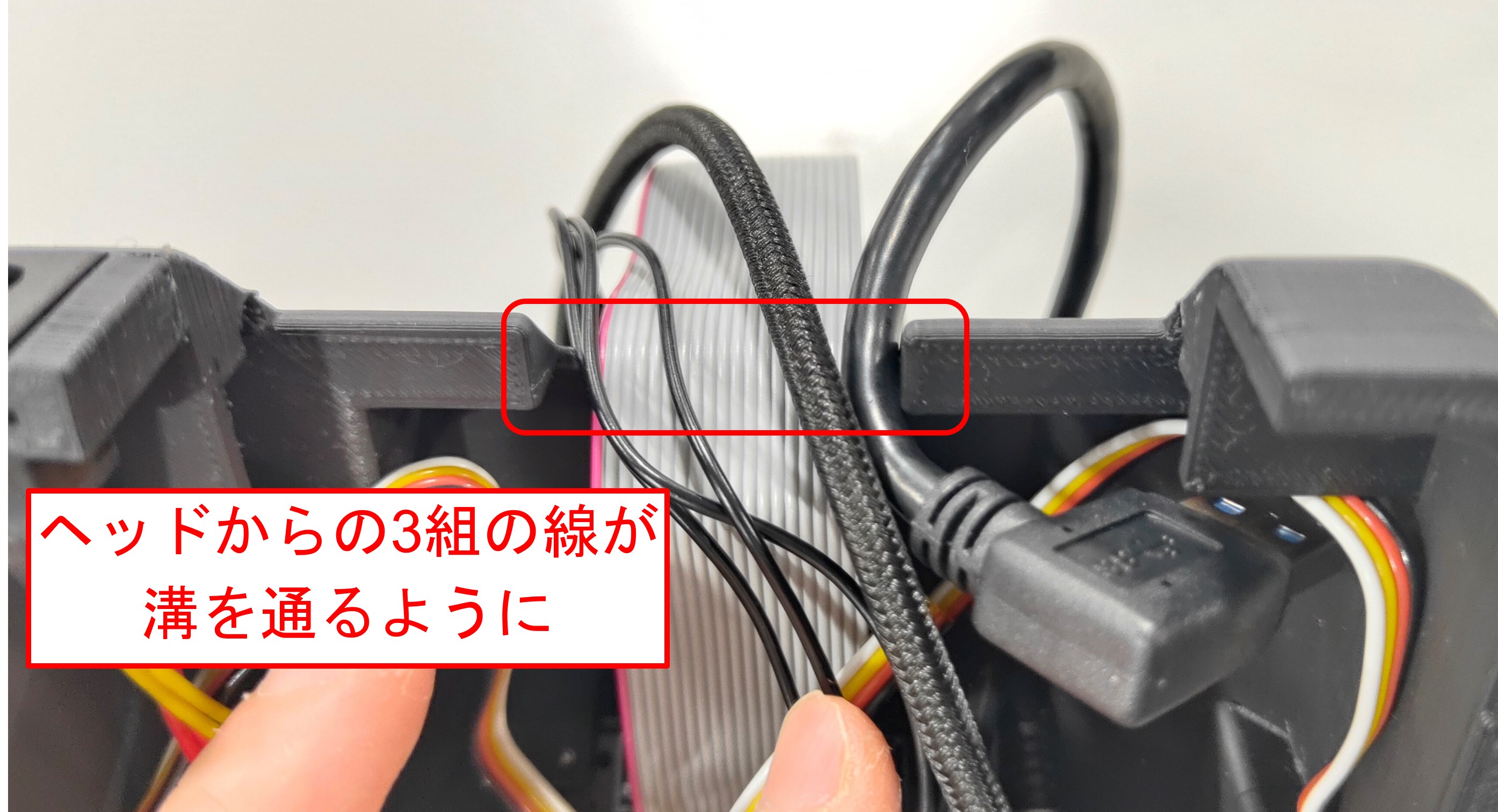
(3) AKARI Body 背面の溝に、ヘッドからの線(GPIOケーブル、OAK-D LITEのケーブル、モータケーブル、USBパネルマウントケーブル)が収まっている状態にする。
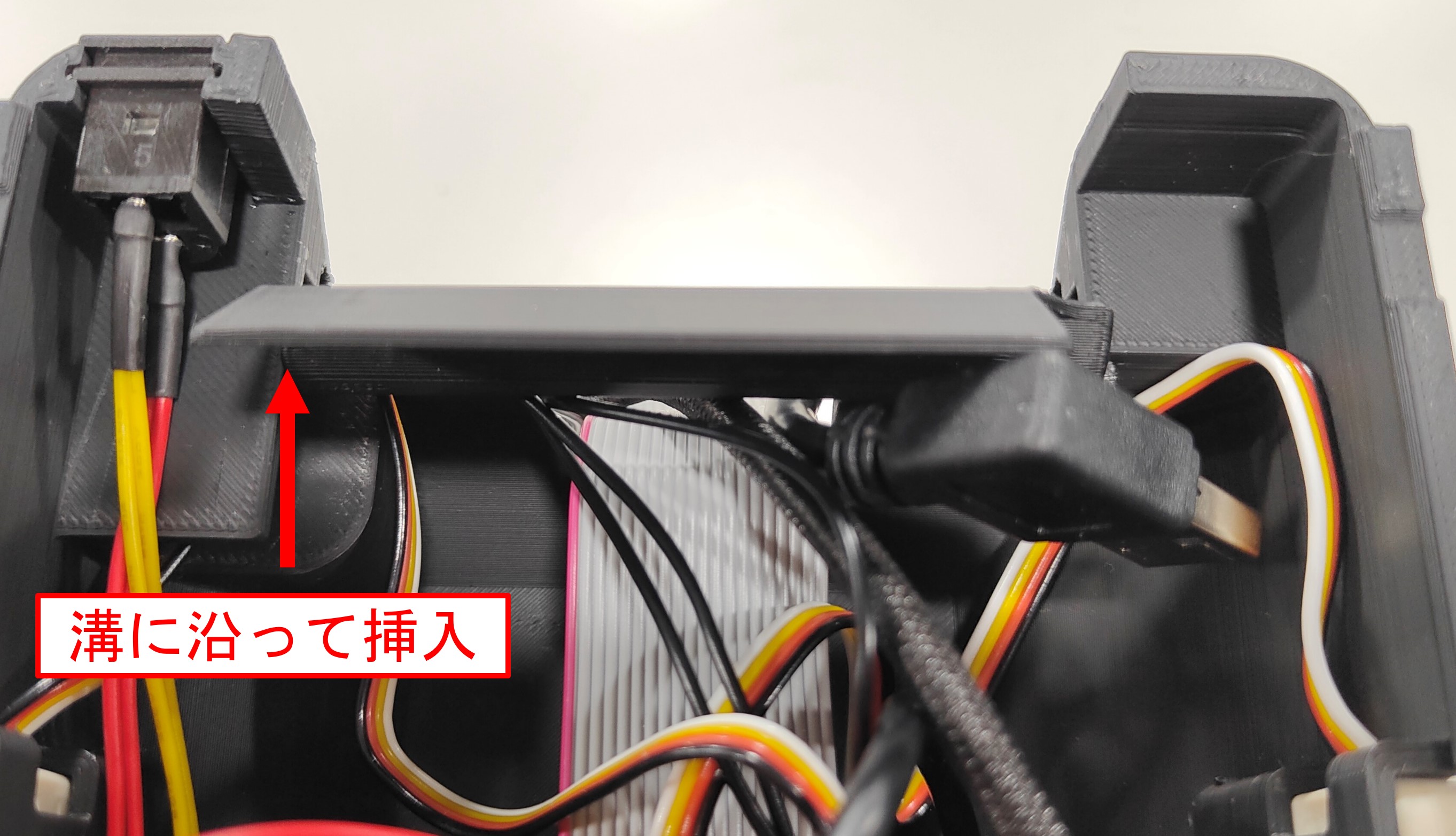
1.の線が (3) AKARI Body と (4) AKARI Cover の間を通るようにしながら、 (3) AKARI Body 内部から (4) AKARI Cover をカチッと奥まで差し込む。

13 USBハブの搭載
必要な部品

手順
(28) USBハブ 4ポート15cm をボディー内部にスライドさせて挿入する。

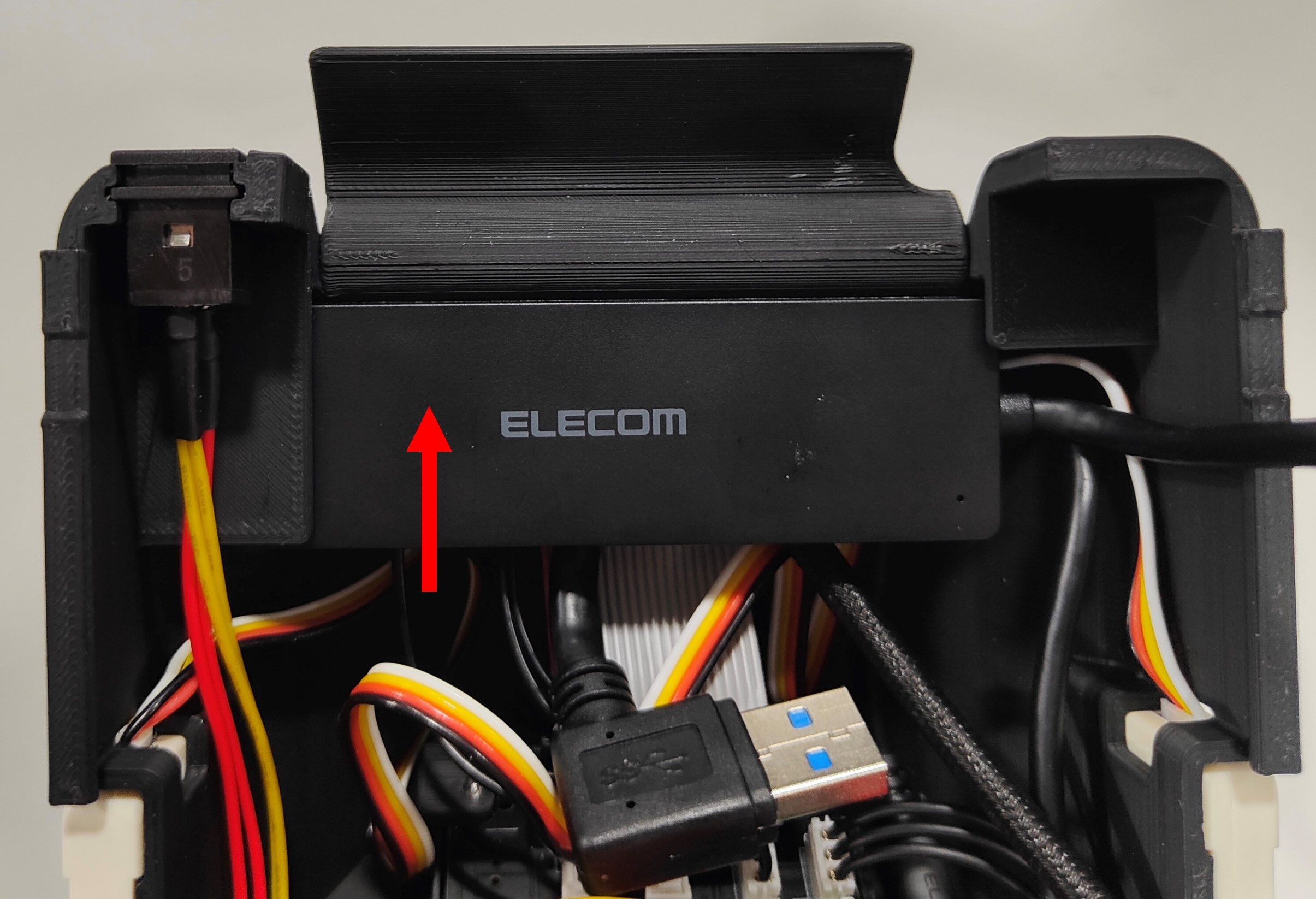
OAK-DのUSB線、(28) USBハブ 4ポート15cm のUSB線は、背面のカバーの溝から外部に出す。

14 USBハブへのUSB接続
必要な部品
手順
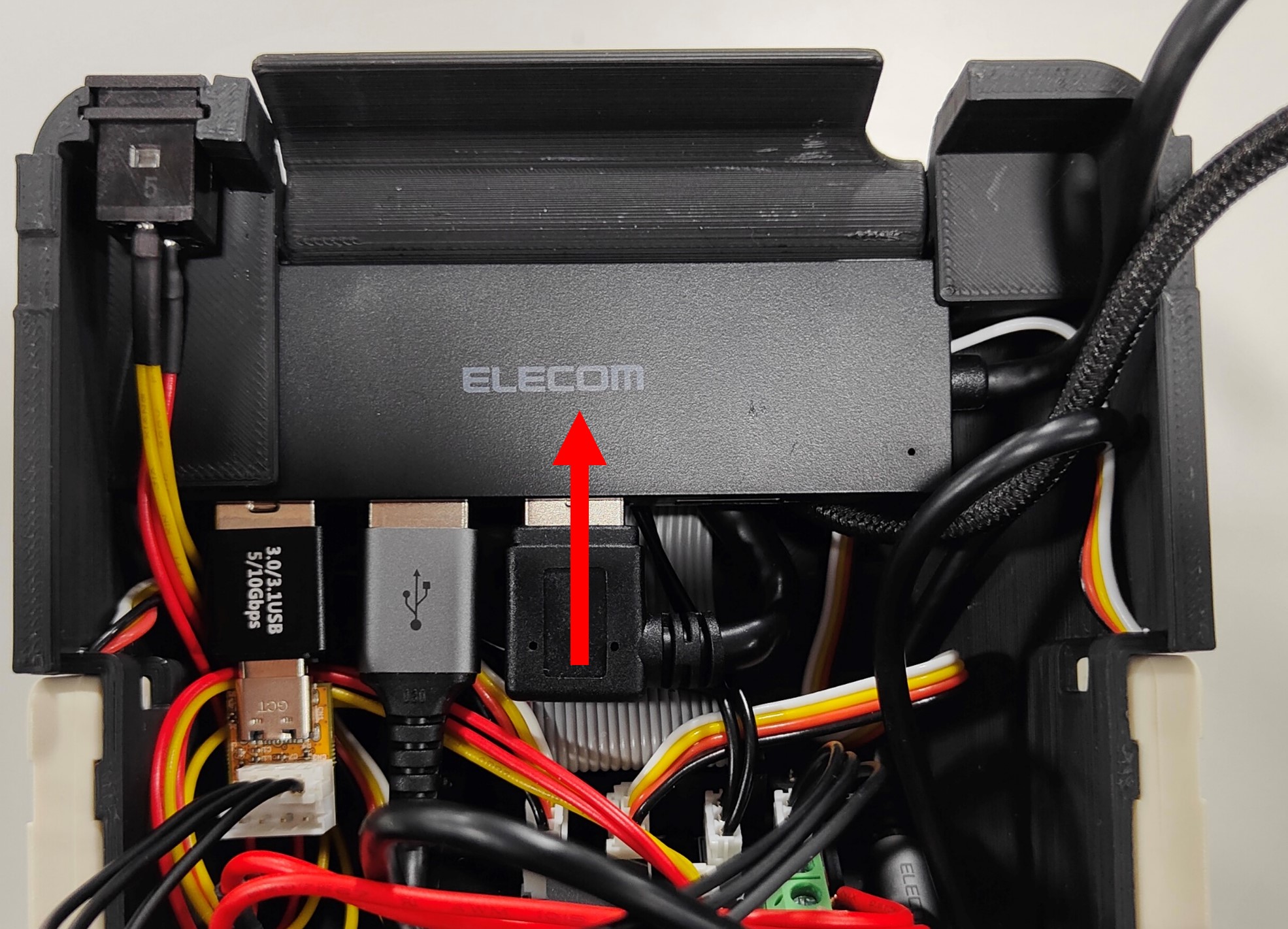
USB2DXIFのUSBをボディー内部のUSBハブ(一番左)に差し込む。

M5StackのUSBをボディー内部のUSBハブ(左から2番目)に差し込む。
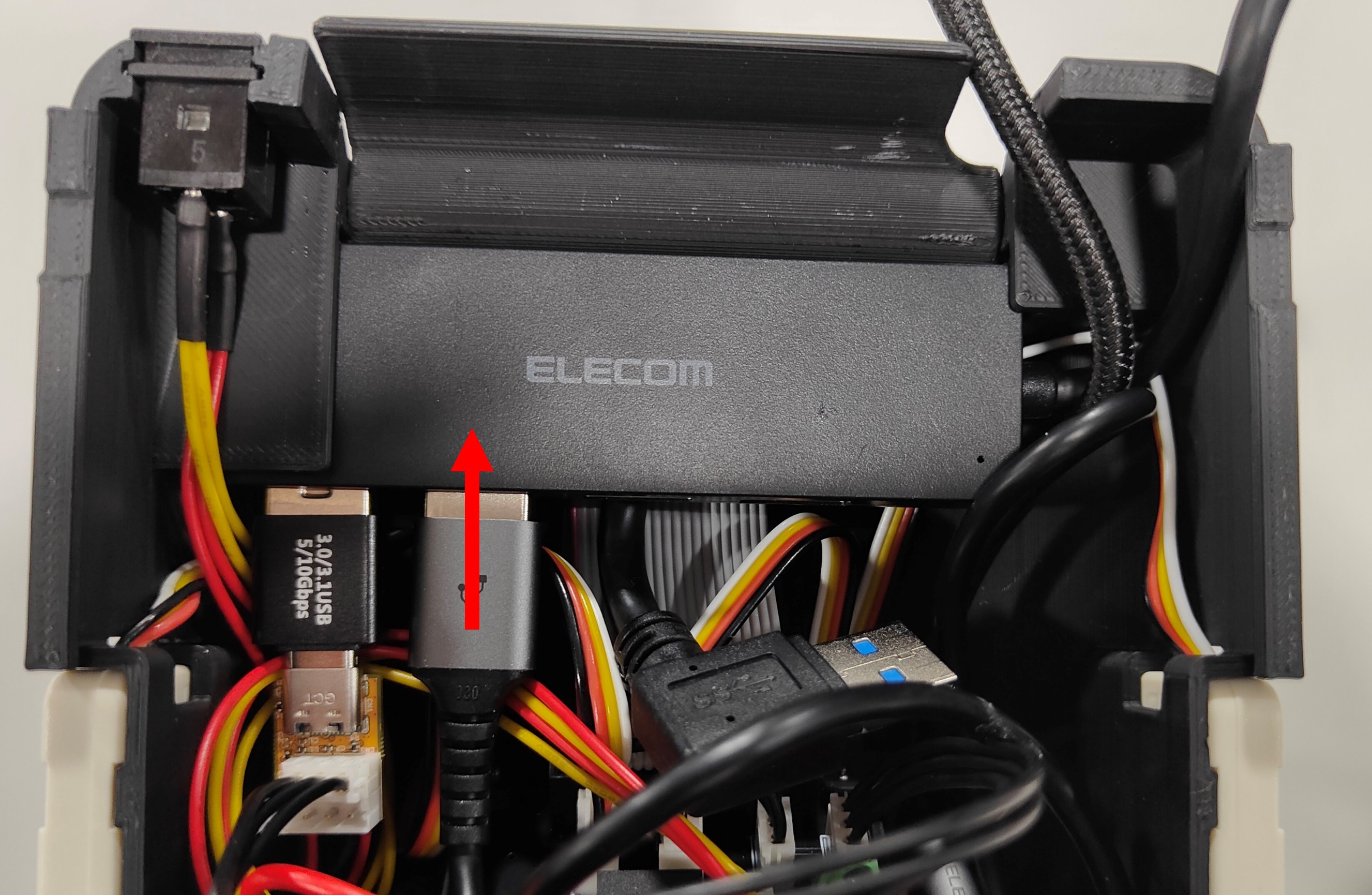
ヘッドのUSBパネルマウントからのUSBをボディー内部のUSBハブ(左から3番目)に差し込む。
15 可動域の確認
必要な部品
手順
ヘッドを上下左右に外から動かしてみて、ケーブルの引っ掛かりがないか確認する。

ベースを組み立てよう へ進む
組み立てに必要なもの へ戻る